MetaQuestでハンドトラッキングを有効化する方法についてです。 ]]>
メジャー機能の基本的な使い方は以下の記事を参照ください。
bluebirdofoz.hatenablog.com
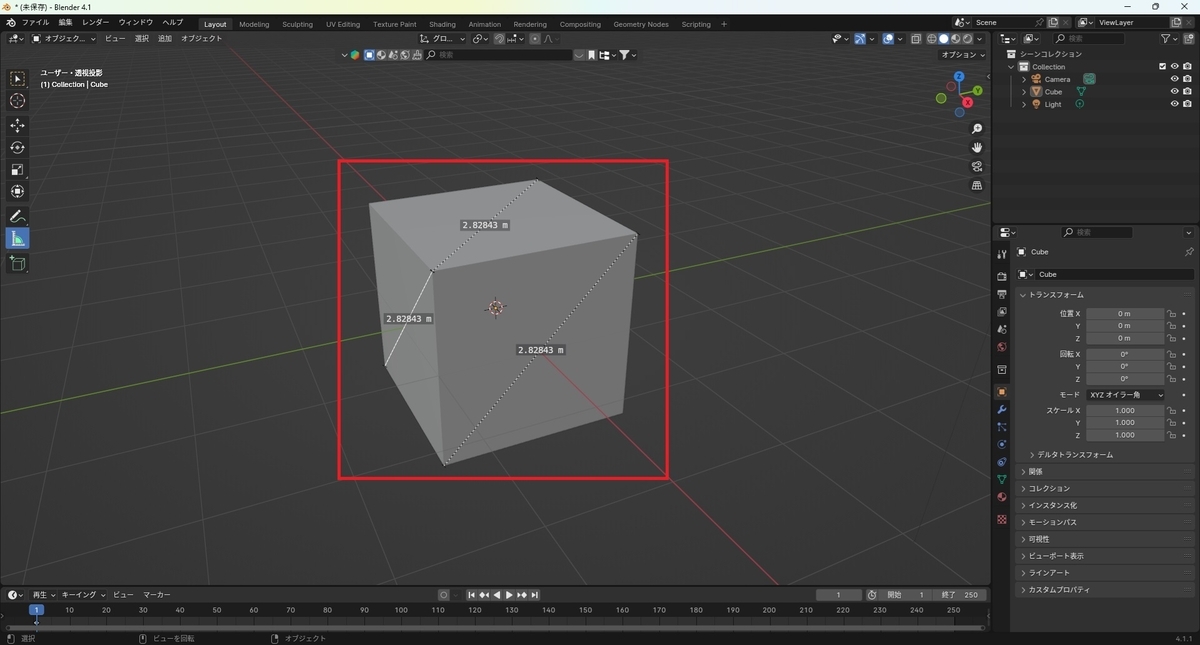
一例として以下の通り、Cubeオブジェクトの3面にメジャーの計測を行いました。
個別に削除を行いたい場合は任意のオブジェクトを左クリックで選択状態にします。
この状態で[X]キーまたは[Delete]キーでの削除を実行します。
これでメジャーを個別に削除できます。
メジャーの公式マニュアルは以下になります。
メジャーをUIから個別削除する方法はないようです。
docs.blender.org
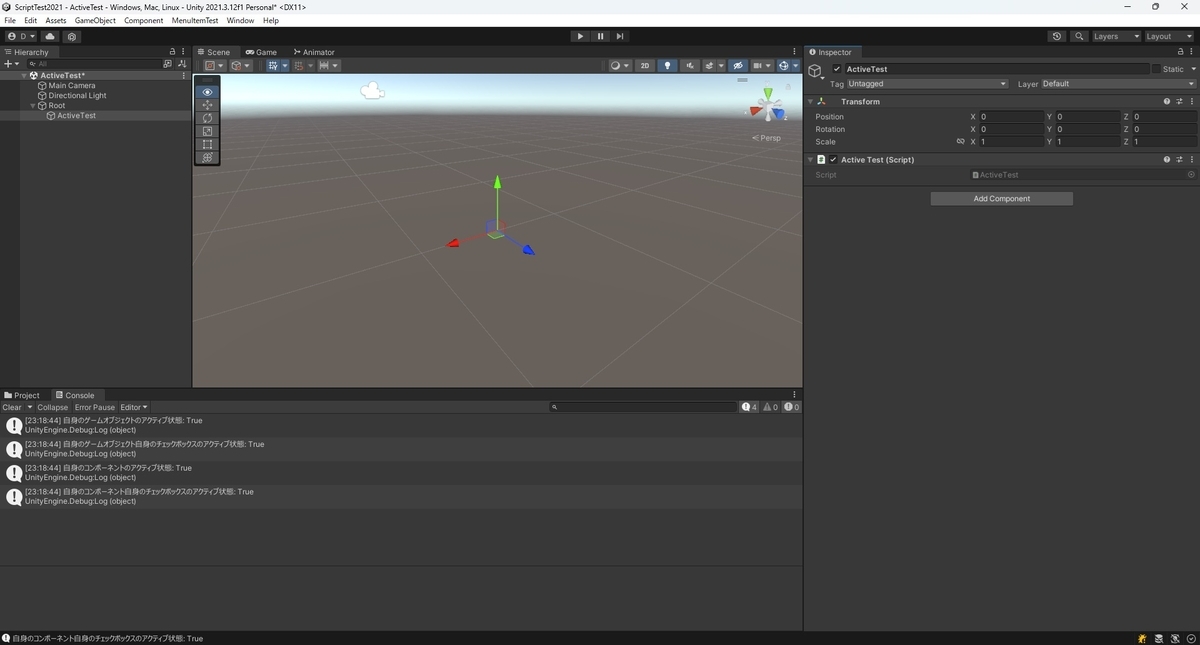
MonoBehaviourからオブジェクトやコンポーネントのアクティブ状態をチェックするには以下のいくつかのプロパティが利用できます。
| プロパティ名 | 説明 |
|---|---|
| activeInHierarchy | ヒエラルキーにおける自身のオブジェクトの有効無効状態を取得する |
| activeSelf | 自身のオブジェクト自体の有効無効の切り替え状態を取得する |
| isActiveAndEnabled | コンポーネントの動作の有効無効状態を取得する |
| enabled | コンポーネント自体の有効無効の切り替え状態を取得する |
以下のサンプルスクリプトを使って状況ごとの戻り値を確認してみます。
・ActiveTest.cs
using UnityEngine; public class ActiveTest : MonoBehaviour { private void Update() { // コンポーネントのチェックボックスを表示するためUpdate関数を記述 } [ContextMenu("ActiveCheck")] public void ActiveCheck() { // 様々なパターンのアクティブ状態を確認する // 1. 自身のゲームオブジェクトのアクティブ状態を確認する Debug.Log("自身のゲームオブジェクトのアクティブ状態: " + gameObject.activeInHierarchy); // 2. 自身のゲームオブジェクト自身のチェックボックスのアクティブ状態を確認する Debug.Log("自身のゲームオブジェクト自身のチェックボックスのアクティブ状態: " + gameObject.activeSelf); // 3. 自身のコンポーネントのアクティブ状態を確認する Debug.Log("自身のコンポーネントのアクティブ状態: " + this.isActiveAndEnabled); // 4. 自身のコンポーネント自身のチェックボックスのアクティブ状態を確認する Debug.Log("自身のコンポーネント自身のチェックボックスのアクティブ状態: " + this.enabled); } }
オブジェクトとコンポーネント全てが有効な場合は全てTrueが返ります。
| プロパティ名 | 結果 |
|---|---|
| activeInHierarchy | True |
| activeSelf | True |
| isActiveAndEnabled | True |
| enabled | True |
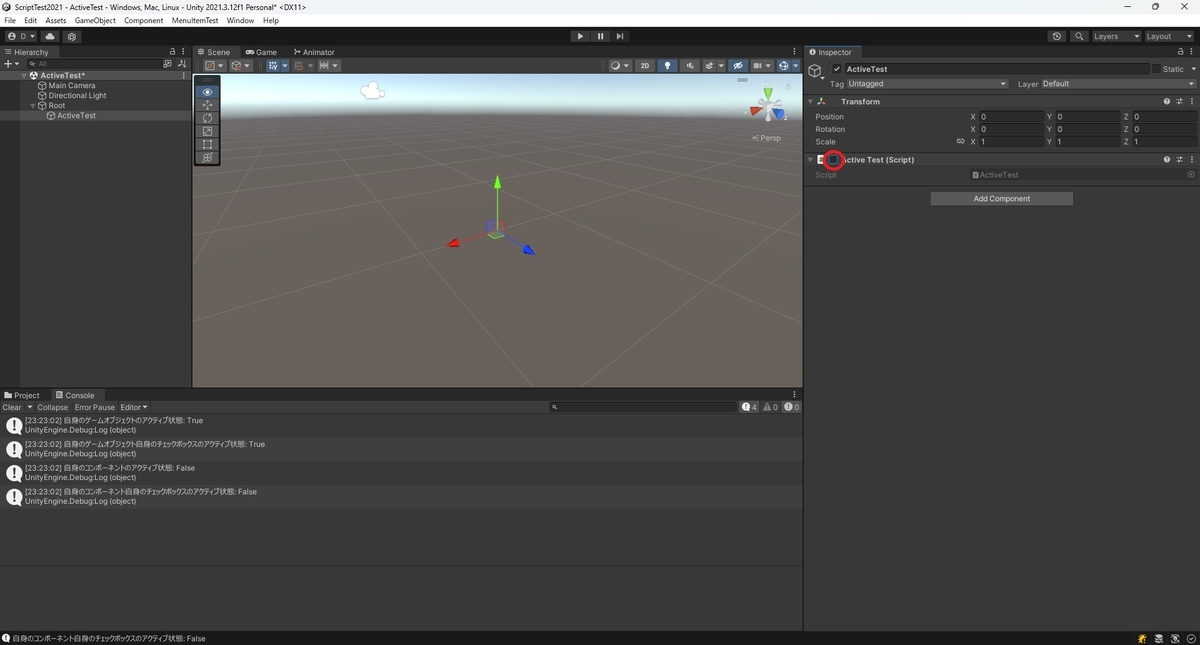
コンポーネントのみチェックを外した場合、コンポーネントの関連のisActiveAndEnabled,enabled両方でFalseが返ります。
| プロパティ名 | 結果 |
|---|---|
| activeInHierarchy | True |
| activeSelf | True |
| isActiveAndEnabled | False |
| enabled | False |
Invokeの基本的な仕様は以下の前回記事を参照ください。
bluebirdofoz.hatenablog.com
MonoBehaviourのInvokeRepeatingは指定のメソッドを指定秒後に呼び出し、その後一定秒ごとに繰り返します。
docs.unity3d.com
void Start() { // 2秒後から5秒間隔でDebugLogメソッドを呼び出す InvokeRepeating("DebugLog", 2.0f, 5.0f); } void DebugLog() { Debug.Log("Hello, World!"); }
InvokeRepeatingの繰り返しを停止したい場合はMonoBehaviour.CancelInvokeを実行します。
また処理が実行中か否かはMonoBehaviour.IsInvokingでチェックできます。
以下の様々なInvokeの呼び出しを試すサンプルスクリプトを作成しました。
・InvokeRepeatingTest.cs
using UnityEngine; public class InvokeRepeatingTest : MonoBehaviour { void Start() { // 2秒後から5秒間隔でDebugLogメソッドを呼び出す InvokeRepeating("VoidDebugLog", 2.0f, 5.0f); } void VoidDebugLog() { // アプリの起動時からの経過時間を取得する float elapsedTime = Time.time; Debug.Log($"Called VoidDebugLog() : {elapsedTime}"); } [ContextMenu("StopInvokeRepeating")] public void StopInvokeRepeating() { // 現在Invokeによる実行が保留中かチェックする if (!IsInvoking("VoidDebugLog")) { Debug.Log("Invokeによる実行が保留中ではありません"); return; } // InvokeRepeatingを停止する CancelInvoke("VoidDebugLog"); Debug.Log("InvokeRepeatingを停止しました"); } }
シーンを再生すると以下の通り指定時間後に処理が繰り返して実行されます。

繰り返し処理を停止するにはコンテキストメニューからStopInvokeRepeating関数を呼び出します。

繰り返し処理が実行中の場合は呼び出しが停止されます。
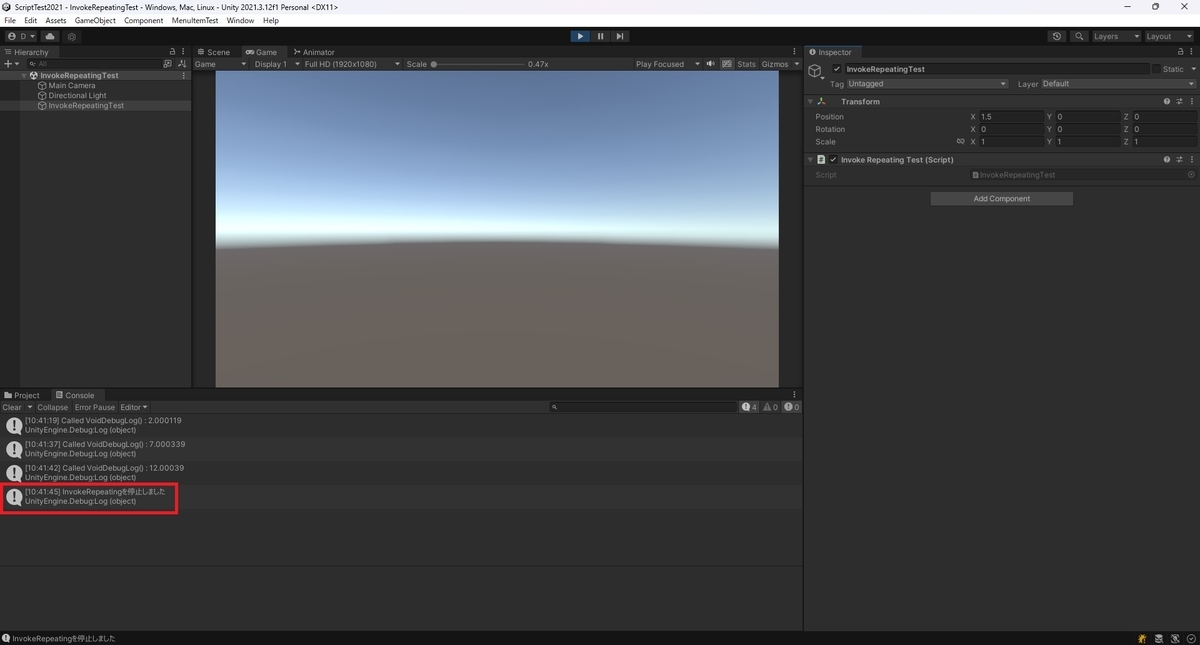
停止後、再度StopInvokeRepeating関数を呼び出すとMonoBehaviour.IsInvokingでfalseが返っているのが確認できます。

MonoBehaviourのInvokeは指定のメソッドを指定秒後に呼び出します。
docs.unity3d.com
void Start() { // 2秒後にDebugLogメソッドを呼び出す Invoke("DebugLog", 2.0f); } void DebugLog() { Debug.Log("Hello, World!"); }
Invokeで呼び出すメソッドは引数を指定することはできません。
MonoBehaviour.StartCoroutineと異なり、戻りがIEnumeratorではない通常のメソッドでも呼び出し対象に指定できます。
以下の様々なInvokeの呼び出しを試すサンプルスクリプトを作成しました。
・InvokeTest.cs
using UnityEngine; public class InvokeTest : MonoBehaviour { void Start() { // 秒数指定が0の場合は直後(Update前)に実行される Invoke("VoidDebugLog", 0.0f); // 2秒後にメソッドを実行する Invoke("VoidDebugLog", 2.0f); // 負数の場合は指定なしまたは0秒と同様に即座に実行される Invoke("VoidDebugLog", -1.0f); // 戻り値があるメソッドもInvokeで呼び出せる Invoke("BoolDebugLog", 3.0f); // 引数があるメソッドはInvokeで呼び出せない Invoke("ArgumentDebugLog", 4.0f); } void VoidDebugLog() { Debug.Log("Called VoidDebugLog()"); } bool BoolDebugLog() { Debug.Log("Called BoolDebugLog()"); return true; } void ArgumentDebugLog(string message) { Debug.Log("Called ArgumentDebugLog() : " + message); } }
以下の通り指定時間後に処理が実行されました。

引数があるメソッドは以下のエラーが発生して実行できません。
Trying to Invoke method: InvokeTest.ArgumentDebugLog couldn't be called.
MonoBehaviour.destroyCancellationTokenはMonoBehaviour が破棄されたときに発生するキャンセルトークンです。
Unity2022.2以降または2023.1以降で利用できます。
docs.unity3d.com
System.Threading.CancellationToken cancelToken = this.destroyCancellationToken; await System.Threading.Tasks.Task.Delay(TimeSpan.FromSeconds(10), cancelToken);
destroyCancellationTokenを参照して待機タスクのキャンセルを行う以下のサンプルスクリプトを作成しました。
using System; using UnityEngine; public class CancelTokenTest : MonoBehaviour { /// <summary> /// 本オブジェクトまたはコンポーネントの破棄を監視するためのCancellationToken /// </summary> private System.Threading.CancellationToken cancelToken => this.destroyCancellationToken; [ContextMenu("WaitFrame")] public async void WaitFrame() { try { // 再生モード時のみ実行する if (!Application.isPlaying) return; // 10秒待機する Debug.Log("待機タスクを開始します"); await System.Threading.Tasks.Task.Delay(TimeSpan.FromSeconds(10), cancelToken); // 待機タスクが完了したらログを出力する Debug.Log("10秒待機を完了しました"); } catch (OperationCanceledException) { // 待機タスクがキャンセルされた場合の処理 Debug.Log("タスクをキャンセルしました"); } } }
コンテキストメニューから関数を実行します。

オブジェクトが破棄されない場合はタスクが正常に完了します。

次に待機中にゲームオブジェクトを削除してみます。

以下の通りオブジェクトの破棄がキャンセルトークンで即座に検知されてタスクがキャンセルされます。

MonoBehaviour.destroyCancellationTokenが実装されていない以前のUnityの場合、以下のUniTaskのGetCancellationTokenOnDestroy関数を使ってオブジェクト破棄を検知するキャンセルトークンを取得できます。
bluebirdofoz.hatenablog.com
Inspector上に表示されるコンポーネントのチェックボックスは以下のライフサイクル関数の実行有無を切り替えることができます。
・Start()
・Update()
・FixedUpdate()
・LateUpdate()
・OnGUI()
・OnDisable()
・OnEnable()
docs.unity3d.com

以下のスクリプトをチェックボックスをONにした状態とOFFにした状態でシーンを再生してみます。
・EnableTest.cs
using UnityEngine; public class EnableTest : MonoBehaviour { void Start() { Debug.Log("EnableTest Start"); } void Update() { Debug.Log("EnableTest Update"); } void FixedUpdate() { Debug.Log("EnableTest FixedUpdate"); } void LateUpdate() { Debug.Log("EnableTest LateUpdate"); } }
以下の通りチェックボックスをONにした場合のみ各種メソッドが実行されました。
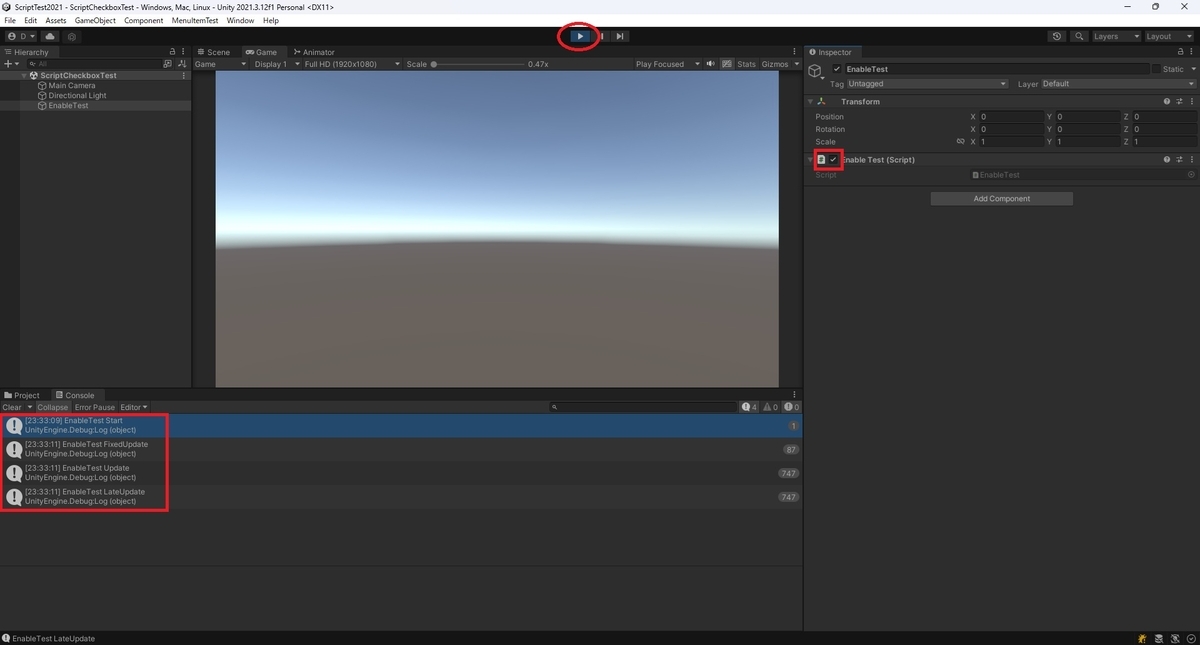

Awake関数はチェックボックスをOFFにしている場合も呼び出される点に注意してください。
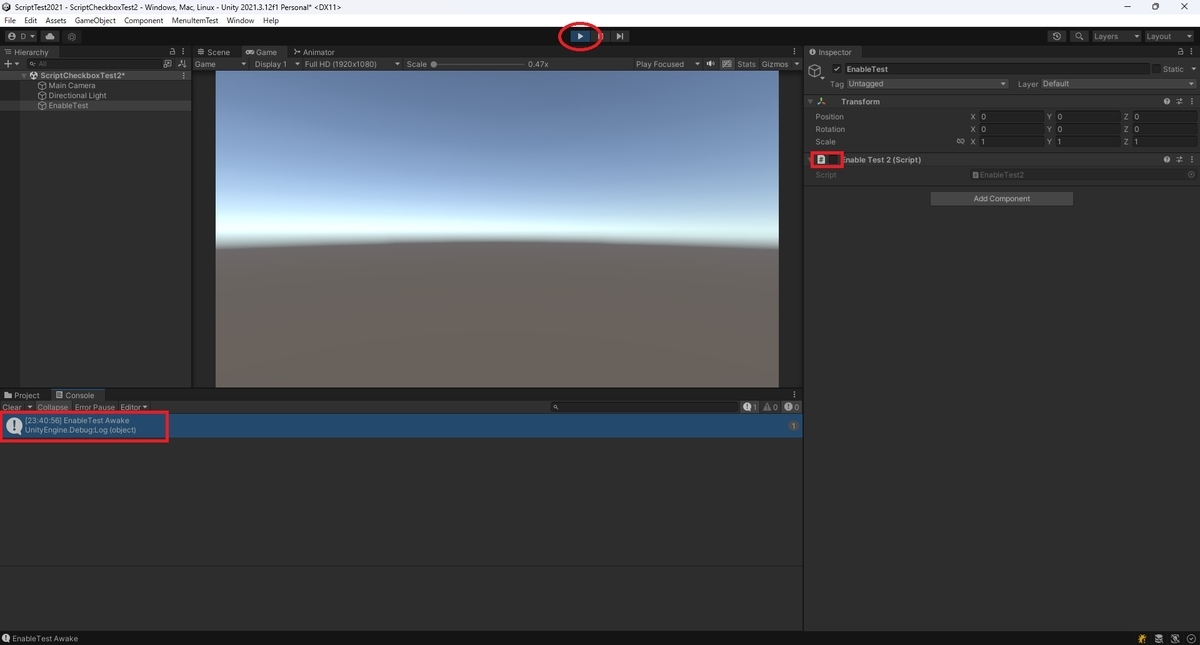
以下のスクリプトをチェックボックスをOFFにした状態でシーンを再生してみます。
・EnableTest2.cs
using UnityEngine; public class EnableTest2 : MonoBehaviour { void Awake() { Debug.Log("EnableTest Awake"); } void Start() { Debug.Log("EnableTest Start"); } }
以下の通りチェックボックスをOFFにしていてもAwake関数が実行されました。
以下の前回記事の続きです。
bluebirdofoz.hatenablog.com
アノテートはレイヤーごとにグループ化して色や線の太さの変更を行うことができます。
[アノテーション]のプルダウンを開いて現在のレイヤーを確認できます。

[+]ボタンをクリックして新しいレイヤーを追加できます。
レイヤーの追加を行わない場合、新しいアノテートを描き込んでも全て同じレイヤーとして扱われます。

追加したレイヤーを選択した状態でアノテートを描き込みます。
すると以下のようにレイヤーごとにアノテートの色分けなどを行うことができます。

以下のようにレイヤーごとに色や線の太さなどを変更することができます。

レイヤー名右側の目玉アイコンをクリックしてレイヤーの表示/非表示を切り替えることができます。

0(透明)~1(不透明)の間で透明度を変更することができます。

1~10の間で線の太さを変更することができます。

アノテートは通常、現在表示中のフレームに描き込まれます。
以下の場合アノテートはフレーム1に描き込まれています。

フレームのロックを有効にした場合、どのフレームにいるときも[フレームx(ロック)]と記載されたフレームにアノテートが描き込まれます。
以下の画面ではフレーム20に移動してアノテートに追加の描き込みを行っていますが、追加の描き込みはフレーム1に行われています。

以下はフレームのロックを行っていないレイヤーで描き込みを行った場合です。
フレーム20で追加の描き込みを行ったため、フレーム20に新たにアノテートが追加されてそこに追加の描き込みが行われます。
このため、フレーム20ではフレーム1で描き込んだアノテートが見えなくなっています。

Blenderのアノテート機能は様々なウィンドウ上で利用できる書き込み機能です。
docs.blender.org
3Dビューポートやノードエディタ―など様々なウィンドウ上で[アノテート]ボタンから利用できます。


アノテートには以下の4つのサブツールが存在します。
フリーハンドのラインを描画します。
ペンのように自由にラインを描きこむことができます。

クリックとドラッグで直線のラインを描画します。
オプションでラインの開始と終了の矢印スタイルを選択できます。

クリック毎にラインを直線に繋ぐ点を打ちこみラインを描画します。
Escを押して終了します。

クリックとドラッグで線を削除します。
アノテートは自由に消すことができ、アノテートラインはラインごとにアノテートポリゴンは点ごとに消すことができます。


やりたかったやつ、ついに出来た。
広域3D Gaussian Splatting!
京都清水寺の参道600mを約2万枚の画像から3D復元。
せっかくだから体験可能な形でも用意したいな。#GaussianSplatting pic.twitter.com/WTlMgX9bm1— 龍 lilea (@lileaLab) May 7, 2024
2024/10/17に正式リリースされた「Unity6」のVFX Graphの新機能を早速使ってみた。
VFX GraphがWebビルドしたものでも再生できるというもの。
SplatVFXを使って3D Gaussian Splattingを表示しました。
『京都産寧坂3DGS』
https://works.lilea.net/3d-digital-archive/kyoto-sanneizaka/
参道全域、約600m程の道程を体験できるバージョン。
こちらの実行ファイルの一般公開はまだしてませんでして、オフラインイベントでの展示にて体験いただいてます。
諸々の最適化等が完了したら一般公開も予定。
そんな大規模 広域な3D Gaussian Splattingをどうやって処理したのか。
建築情報学会ミートアップにてライトニングトークしました。
本日 (10/21) 情報解禁!
『CGWORLD 2024 クリエイティブカンファレンス』に登壇させていただく事になりました。
こちらで広域な3D Gaussian SplattingのワークフローとTIPSについてお話させていただきます。
『地上撮影による広域大規模3D Gaussian Splattingの生成ワークフロー&TIPS』
]]>
ショートカットキーの移動量入力に数式を利用するアドバンストモードについては以下の前回記事を参照ください。
bluebirdofoz.hatenablog.com
デフォルトで数式を利用したい場合はメニューから[編集 -> プリファレンス]を開きます。
プリファレンスダイアログが開くので[入力]タブを開きます。

[デフォルトを詳細な数値入力に]のチェックを入れます。
これでデフォルトでアドバンストモードとなり、数値入力で数式を利用できるようになります。

試しに数値入力を行ってみます。
[G -> X -> 2 -> * -> 2]キーを連続で入力すると以下の通り、[2*2]の数式が計算されて4mオブジェクトが移動しました。


通常時、数値入力は数字のみを受け付けるシンプルモードで動作します。
数値入力で数式を利用するには入力モードをアドバンストモードに切り替える必要があります。
docs.blender.org
アドバンストモードでは[+],[*],[/]などPythonの基本演算が利用できるようになります。
切り替えには[=]または[NumpadAsterisk]キーを入力します。
試しにシンプルモードのままショートカットキーで数値入力を行ってみます。
X軸方向の移動を行うため、[G -> X]キーを入力します。

この状態で次に[2 -> * -> 2]キーを入力します。
シンプルモードで数字のみ受け付けるため、[*]キーは無視されて22mオブジェクトが移動しました。

次にアドバンストモードを試します。[G -> X]キーを入力した後、[=]キーを入力します。
すると以下のように入力式の表示が切り替わります。

この状態で次に[2 -> * -> 2]キーを入力します。
アドバンストモードに切り替わっているため、[2*2]の数式が計算されて4mオブジェクトが移動しました。

ちなみにプロパティウィンドウなどのUI入力ではそのまま数式が利用できます。
以下の通り、[2 * 2]を入力すると4mオブジェクトが移動しました。


以下のような複数のオブジェクトはまとめて回転/拡縮する場合と個別に回転/拡縮する場合では基準点が変わるため結果が異なります。



全てのオブジェクトをまとめて移動/回転/拡縮する場合は3Dビューポートの[選択 -> すべて]を実行します。

これで全てのオブジェクトが選択状態になります。

移動を行う場合は左側の移動ボタンをクリックして移動ツール状態に移行します。

矢印をドラッグすることでオブジェクトを移動できます。
このとき選択中の全てのオブジェクトが移動に追従します。

操作ウィンドウが表示されるので本ウィンドウから詳細な数値を入力して操作することもできます。

全選択中であってもプロパティウィンドウのトランスフォームを変更した場合は対象オブジェクトのみが移動するので注意が必要です。

回転/移動は同様に全選択状態で回転/移動ボタンをクリックして各種ツール状態に移行して行うことができます。


CanvasGroupはUI要素のグループ全体に対する特定の機能を与えます。
CanvasGroupのプロパティはそのコンポーネントがアタッチされているゲームオブジェクトと全ての子要素に影響を与えます。
docs.unity3d.com
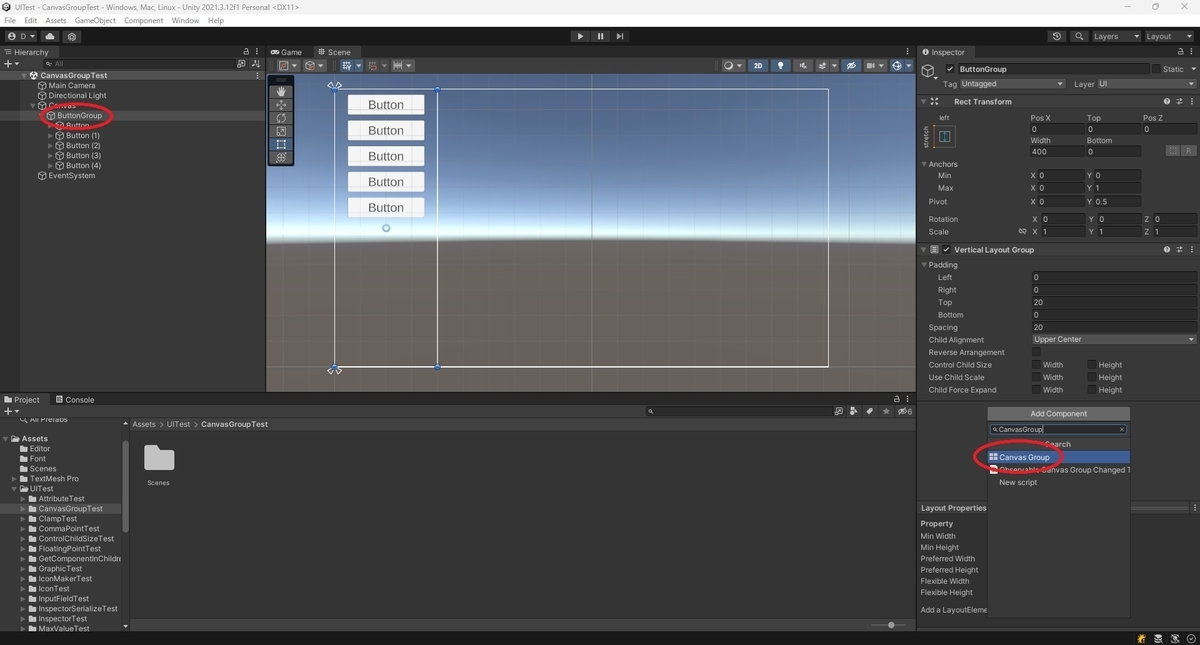
以下のように子要素に全てのボタンオブジェクトを配置したサンプルシーンを用意しました。

CanvasGroupを使ってUIをグループ単位で管理するにはUIの親オブジェクトに[CanvasGroup]コンポーネントを追加します。
シーンを再生して動作を確認します。

CanvasGroupコンポーネントの[Interactable]のチェックを外すと、全ての子要素が入力を受け付けなくなります。

この状態はButtonコンポーネントであればButtonコンポーネントの[Interactable]のチェックを外した状態と同様です。

InteractableとBlockRaycastsはどちらもチェックを外すと入力を受け付けなくなりますが、BlockRaycastsはチェックを外すとレイキャスト自体を素通りさせるようになります。
以下の2つのボタングループを重ね合わせたサンプルシーンで動作を確認してみます。

[Interactable]のチェックを外した場合ボタンは入力を受け付けませんが、レイキャストは遮蔽するため背後のボタンを押すことはできません。

[BlockRaycasts]のチェックを外した場合ボタンは入力を受け付けず、さらにレイキャスト自体が素通りするため背後のボタンが押下されます。

CanvasGroupはUI要素のグループ全体に対する特定の機能を与えます。
CanvasGroupのプロパティはそのコンポーネントがアタッチされているゲームオブジェクトと全ての子要素に影響を与えます。
docs.unity3d.com
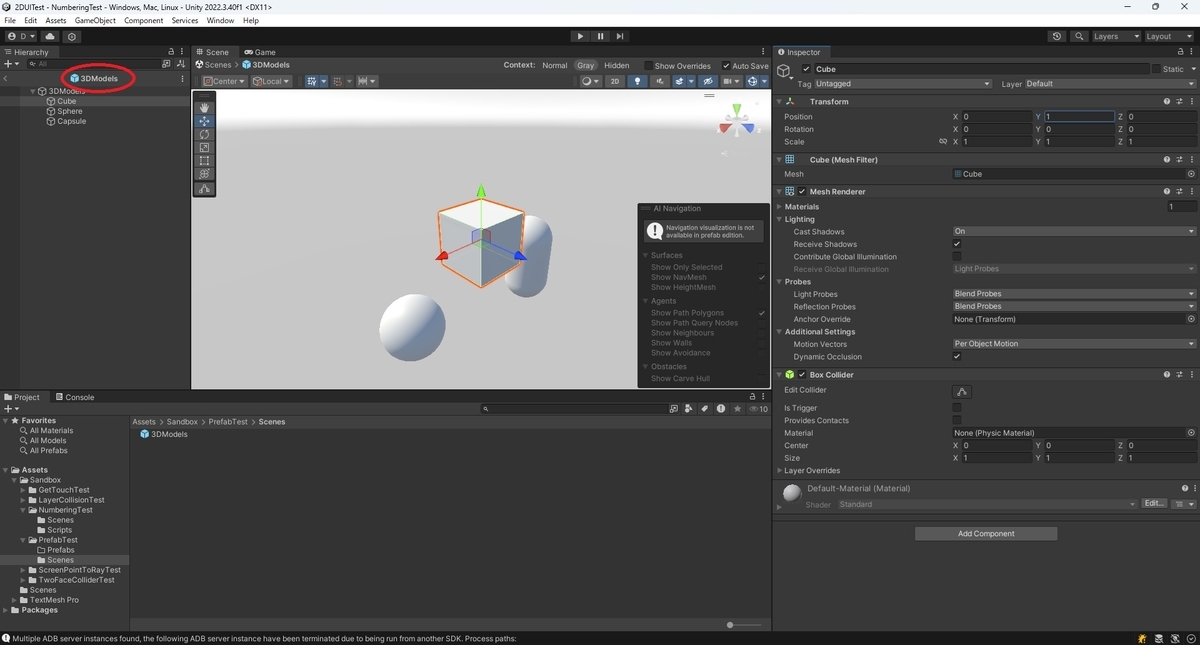
エディターのデフォルト設定ではプレハブの編集の自動保存が有効になっています。
以下のようにプレハブの内容を編集した場合、編集項目からフォーカスが外れるタイミングで編集内容が自動保存されます。
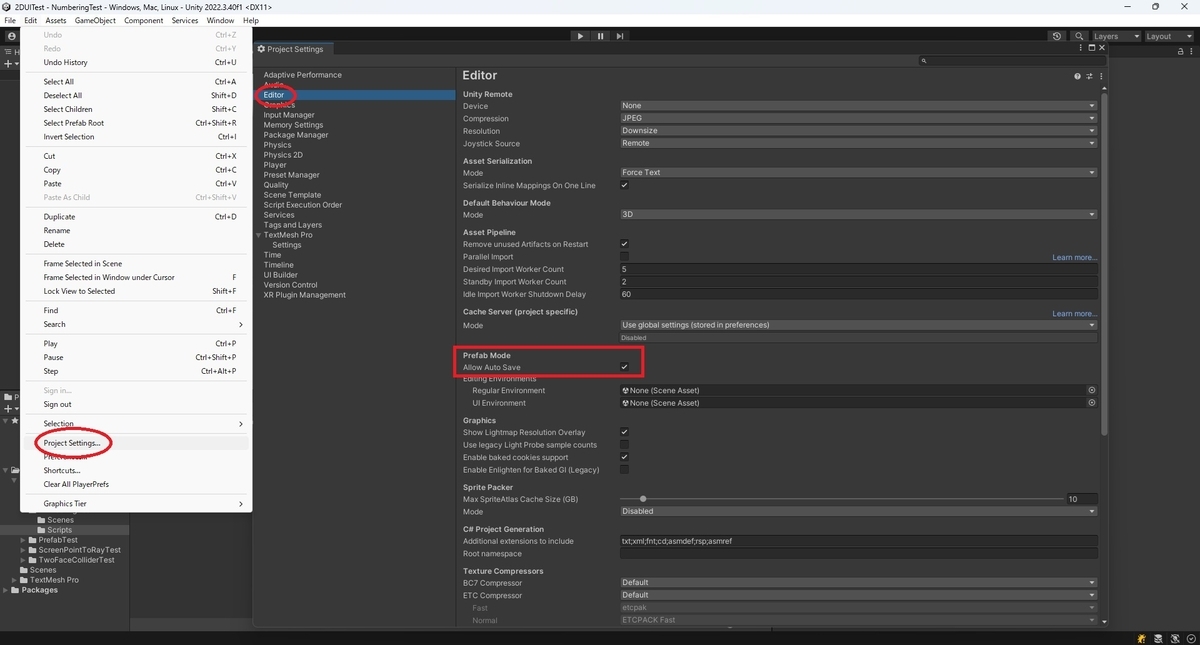
メニューから[Edit -> Project Settings..]を開き、[Editor]タブを開きます。
[Prefab Mode]項目の[Allow Auto Save]で自動保存の有効/無効を切り替えることができます。
以下のようにチェックを外すとプレハブの編集で自動保存が無効になります。
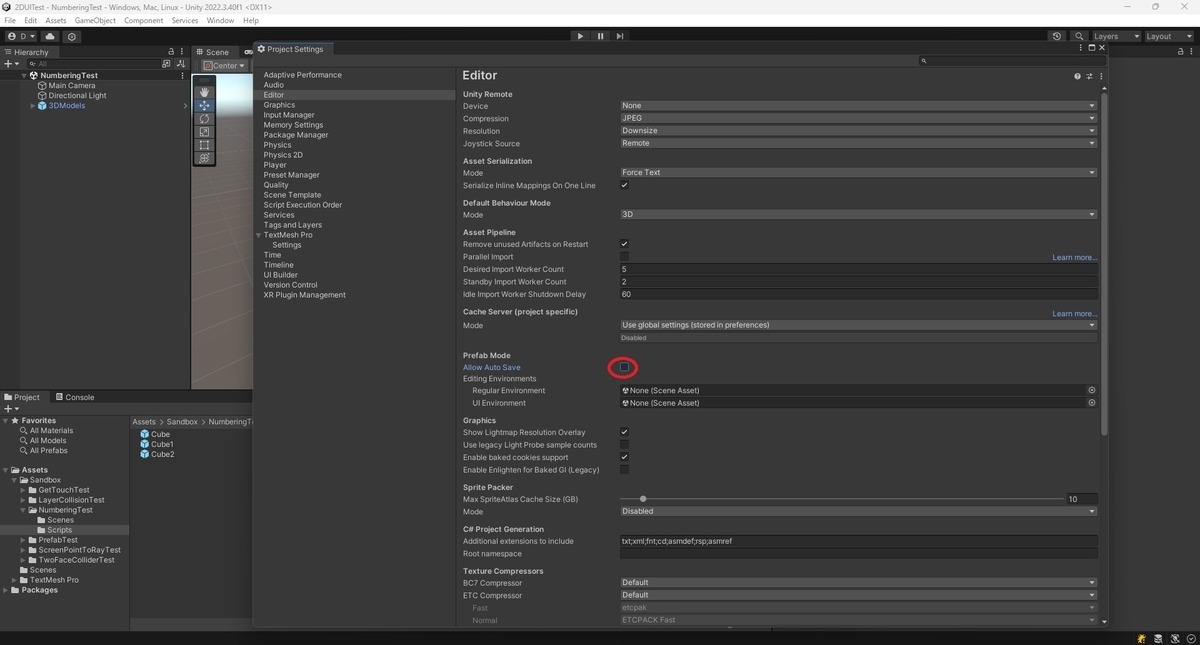
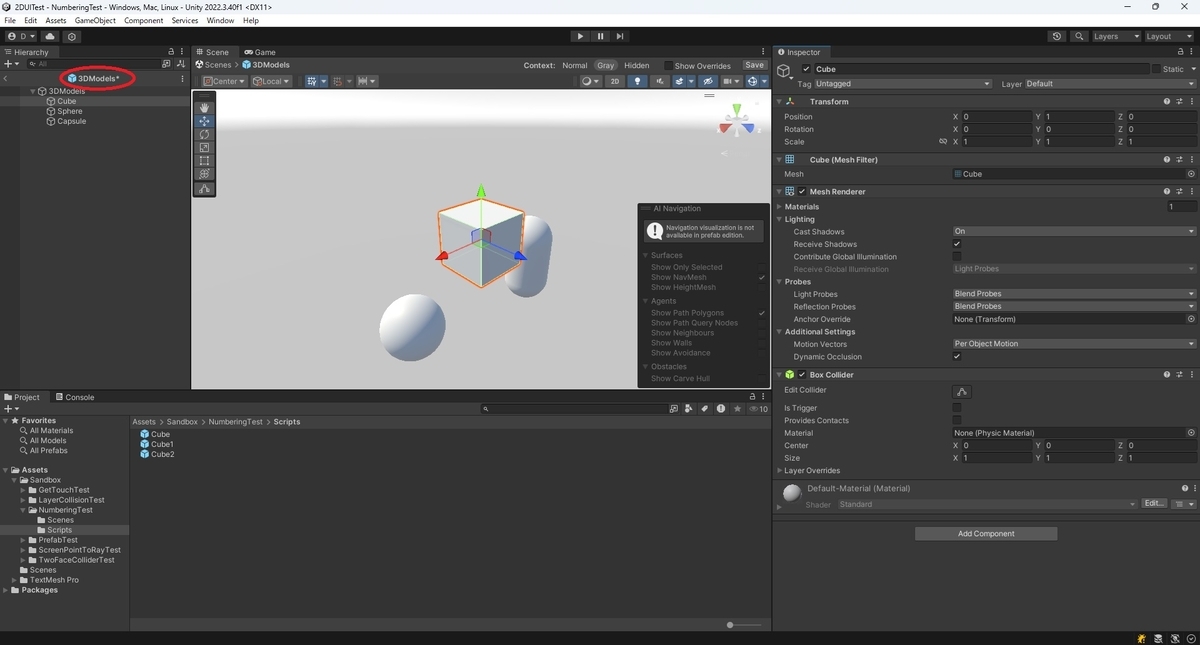
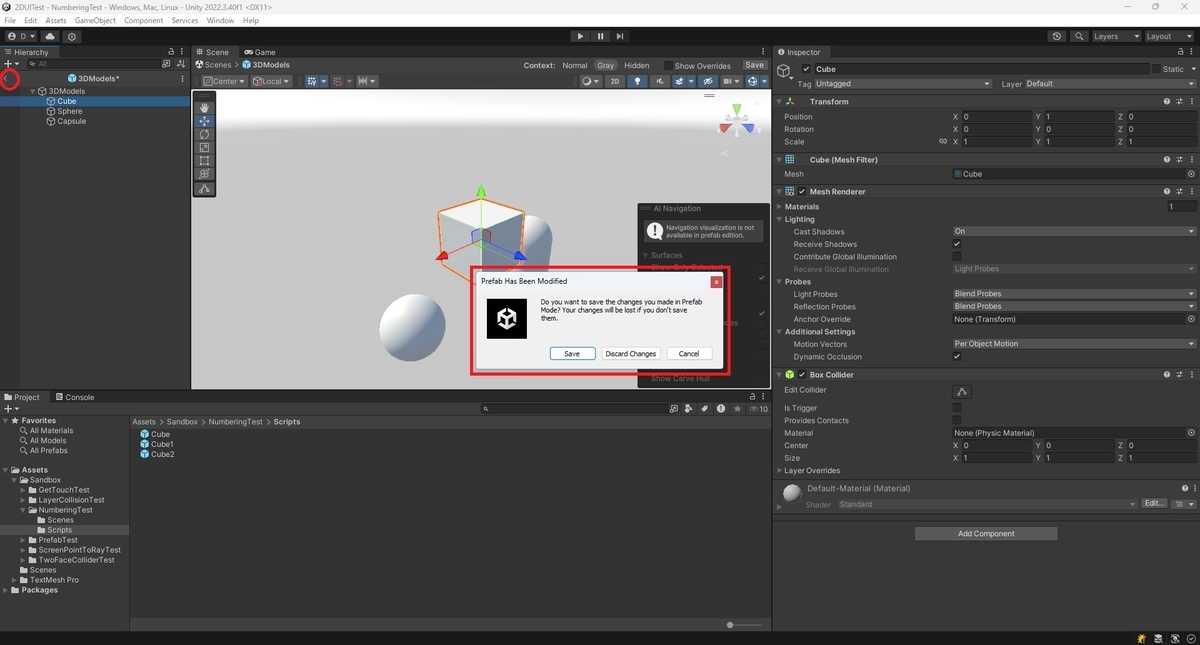
無効時はプレハブの編集から抜ける際に、未保存の変更があった場合は確認ダイアログが表示されます。
メニューから[Edit -> Project Settings..]を開き、[Editor]タブを開きます。
[Numbering Scheme]項目で名前が重複した場合の命名規則を変更できます。

[Game Object Numbering]は命名規則の接尾辞を変更します。
Hierarchy上でオブジェクト名が重複した場合の命名規則は以下の3種類からの選択となります。
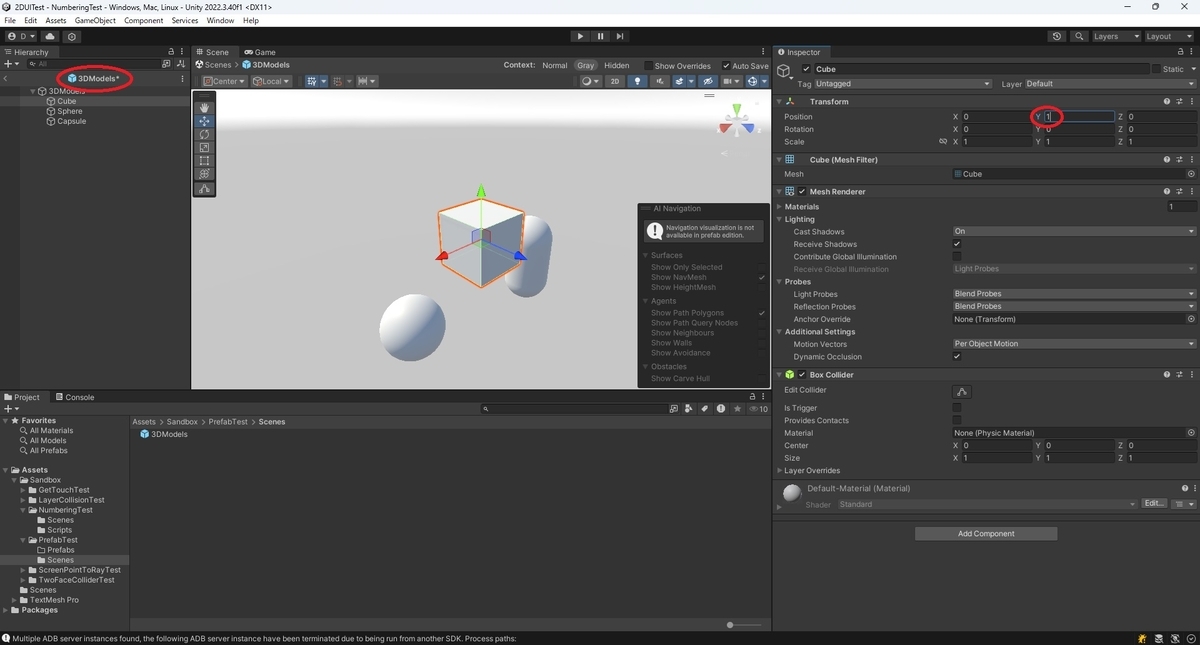
・Prefab (1)
・Prefab.1
・Prefab_1

命名規則を変更すると以下の通りHierarchy上でオブジェクトを複製したときの命名規則が変わります。
あくまで生成時の命名規則を変更する設定のため、すでに生成済みのオブジェクト名は変更されません。


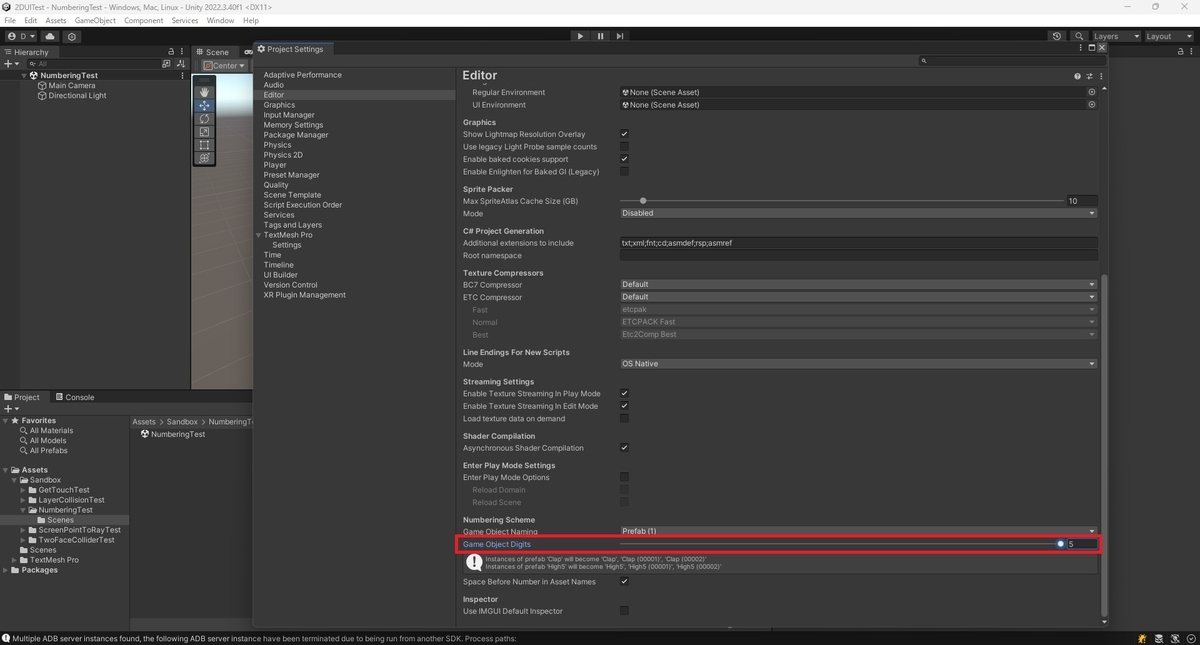
[Game Object Digits]は命名規則の連番の桁数を1~5桁の範囲で変更します。

プレハブのUnpackを行うとプレハブインスタンスが展開されて通常のゲームオブジェクトに戻ります。
これによりプレハブの参照を切ることができ、アセット内のプレハブを変更しても影響を受けなくなります。
docs.unity3d.com
Hierarchyのプレハブインスタンス上で右クリックから[Prefab -> Unpack]を実行します。

これでプレハブインスタンスが展開されます。
Unpackでは選択したプレハブのみが展開され、その配下のプレハブは展開されません。

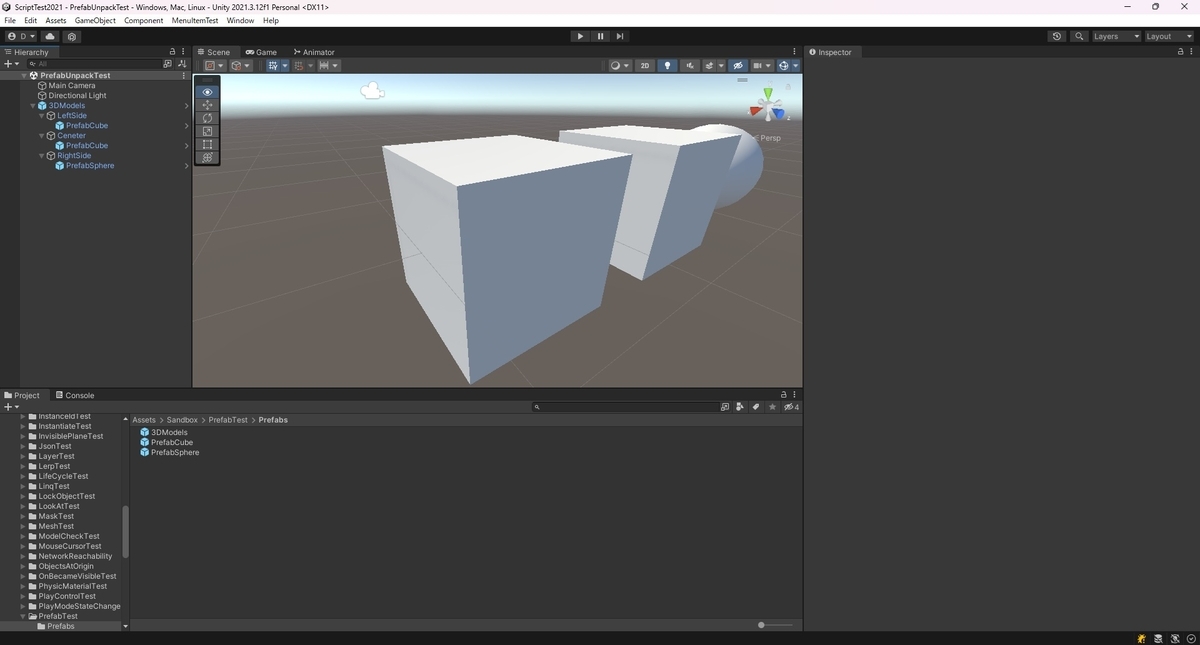
配下を含めて全てのプレハブインスタンスを展開する場合は[Prefab -> Unpack Completely]を実行します。
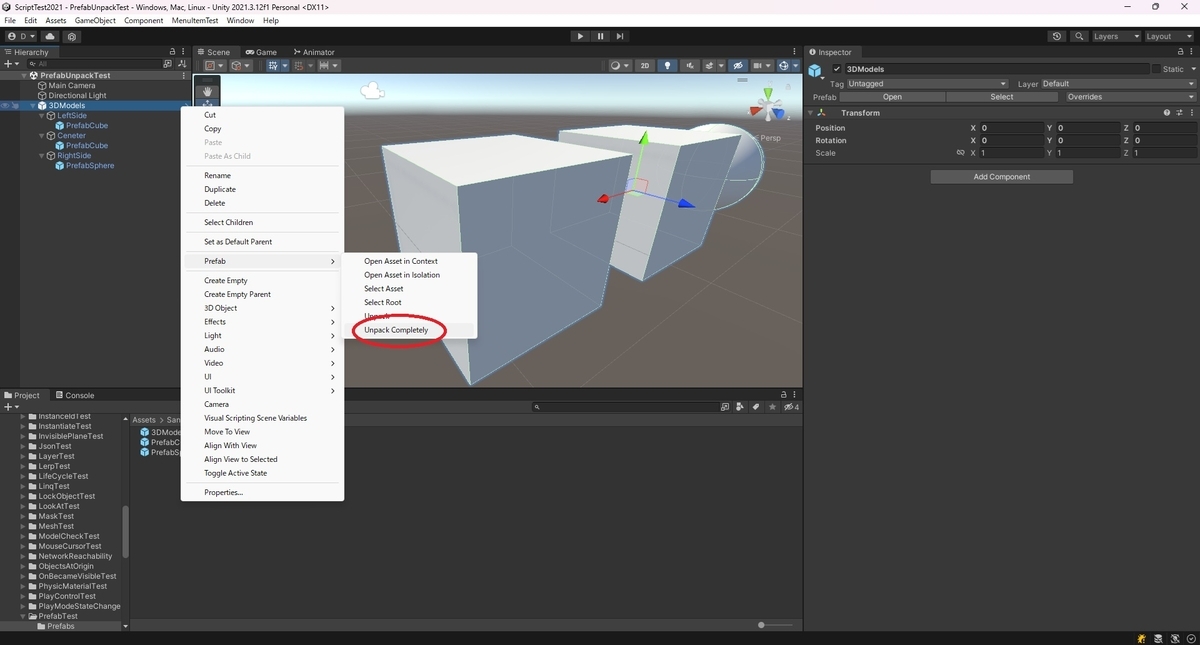
以下の通りUnpack Completelyでは配下も含めて全てのプレハブは展開されます。

プレハブバリアントにUnpackを実行した場合、プレハブバリアントへの参照のみが展開されます。


このため、以下のように展開後のプレハブインスタンスが残ります。
プレハブバリアントで設定していたオーバーライドはシーンのオーバーライド設定として残ります。


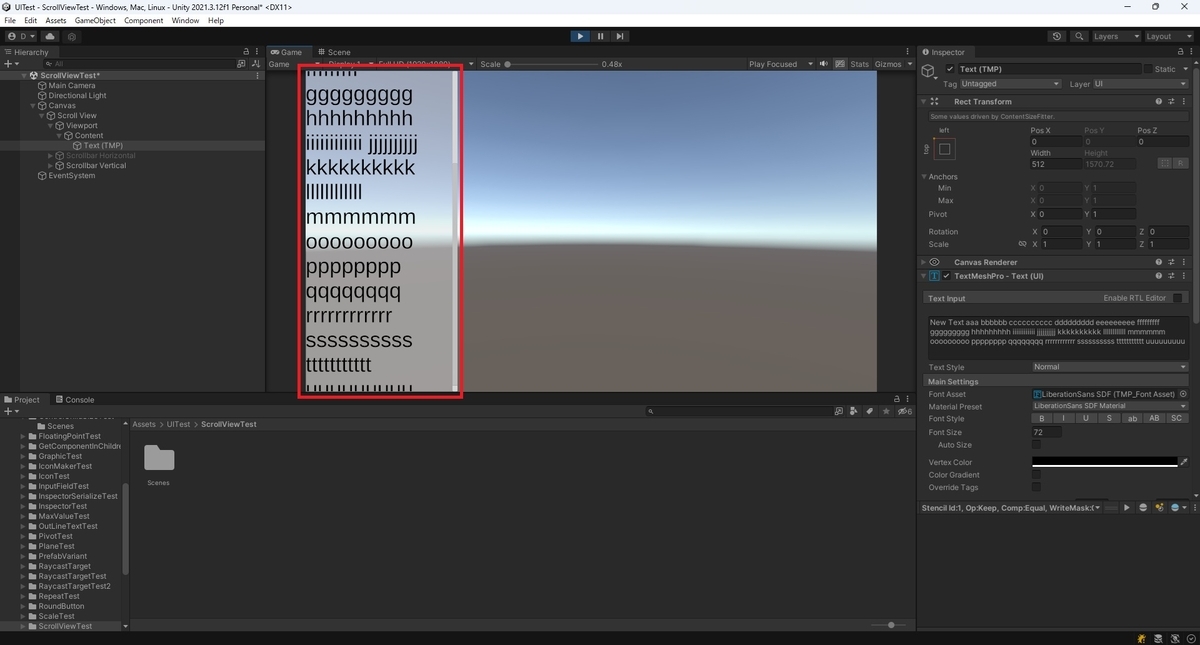
ContentSizeFilterを利用するとTextオブジェクトの改行に合わせて高さのサイズを自動調整できます。
docs.unity3d.com
Hierarchyで右クリックから[UI -> ScrollView]でScrollViewオブジェクトを追加します。

今回は文字列を立てスクロールするViewを作成します。
ScrollViewは縦方向をStretchで詰めたレイアウトで設定しました。
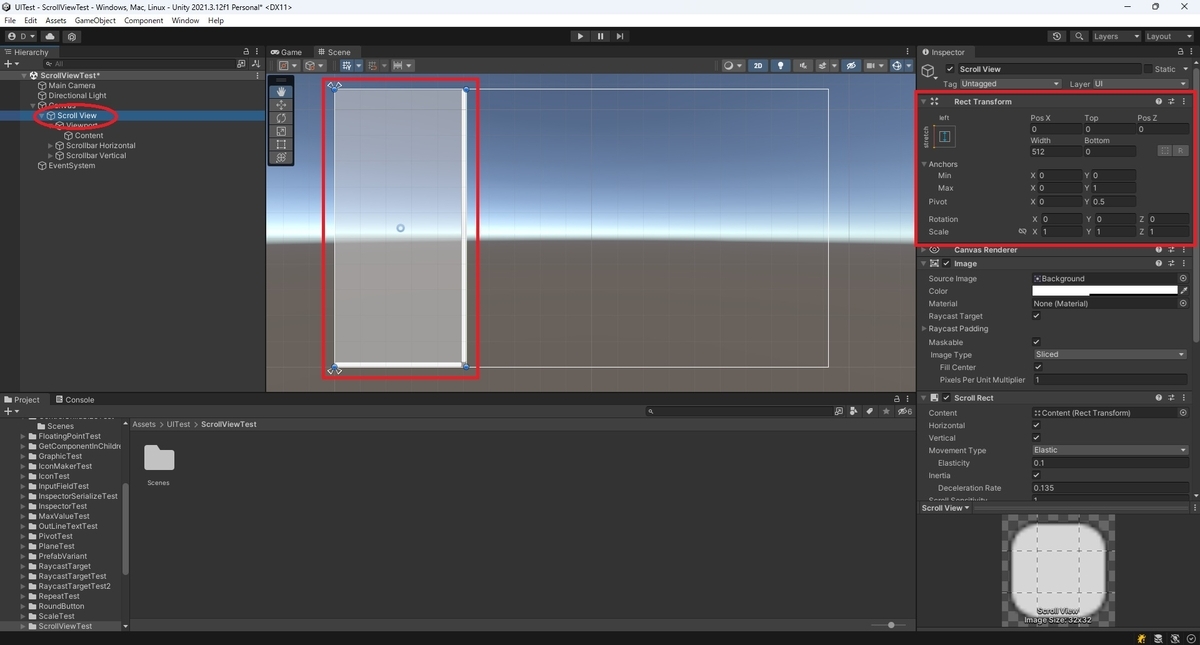
ScrollViewオブジェクトのInspectorビューを開き、ScrollRectコンポーネントの[Horizontal]のチェックボックスを外します。
これで横方向のスクロールが無効となります。

Contentオブジェクト配下に右クリックから[UI -> Text]でTextオブジェクトを追加します。

こちらもピボットの設定を変更し、上方向に詰めたレイアウトで配置します。

Textコンポーネントの[Overflow]を[Scroll Rect]に変更します。
これで文字数が横幅以上になった場合は自動で改行するようになります。

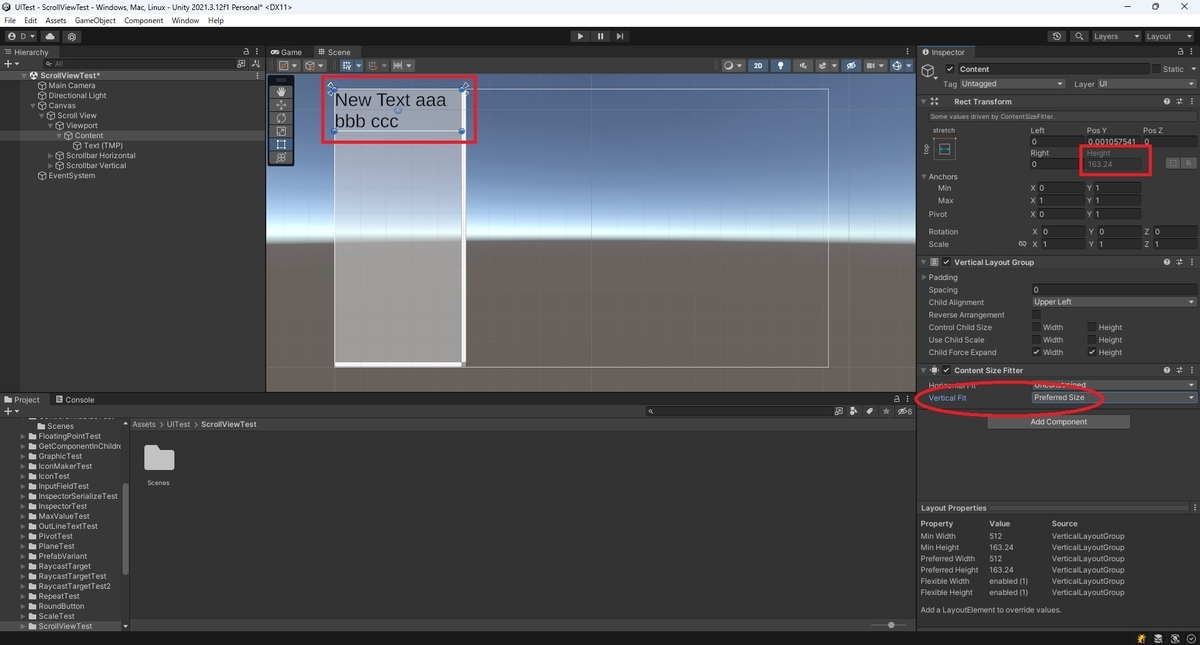
Content Size Fitterコンポーネントを追加し、文字数に応じてオブジェクトサイズが自動調整されるようにします。

[Vertical Fit]を[Preferred Size]に設定すると文字の改行に合わせて縦方向のサイズが自動調整されるようになります。


最後にContentオブジェクトが配下のTextコンポーネントに合わせてサイズが自動調整されるようにします。
こちらはVertical Layout GroupコンポーネントとContent Size Fitterコンポーネントを追加します。
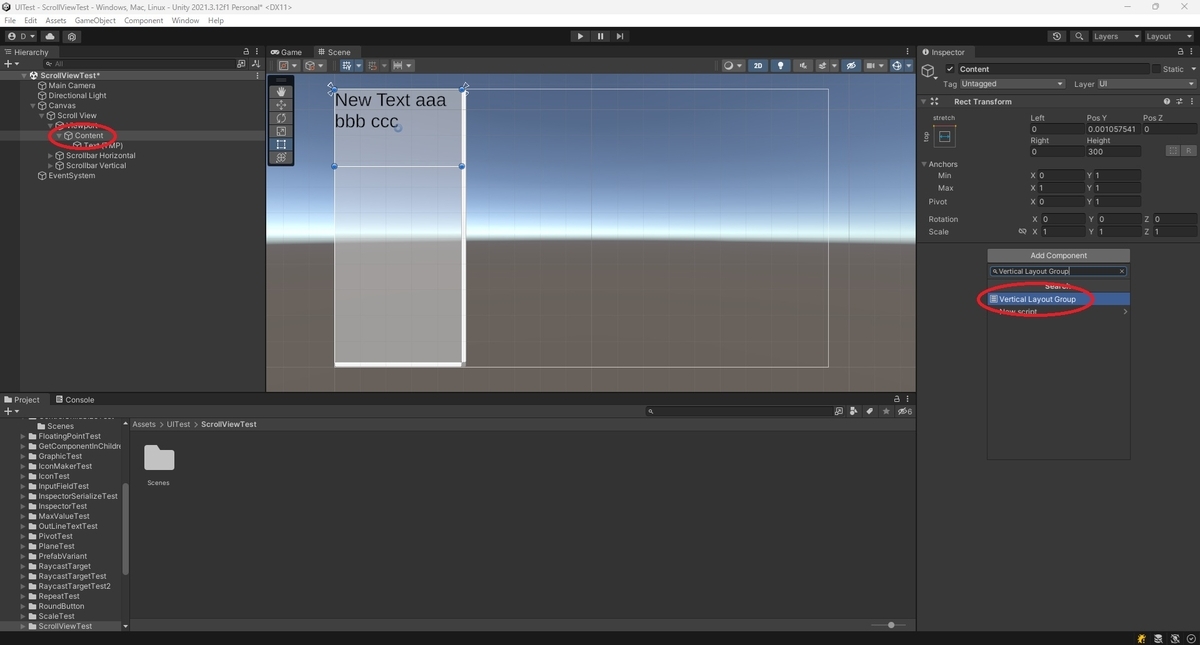

こちらも[Vertical Fit]を[Preferred Size]に設定します。
これで配下のTextオブジェクトに合わせて縦方向のサイズが自動調整されるようになります。
シーンを再生して動作を確認します。
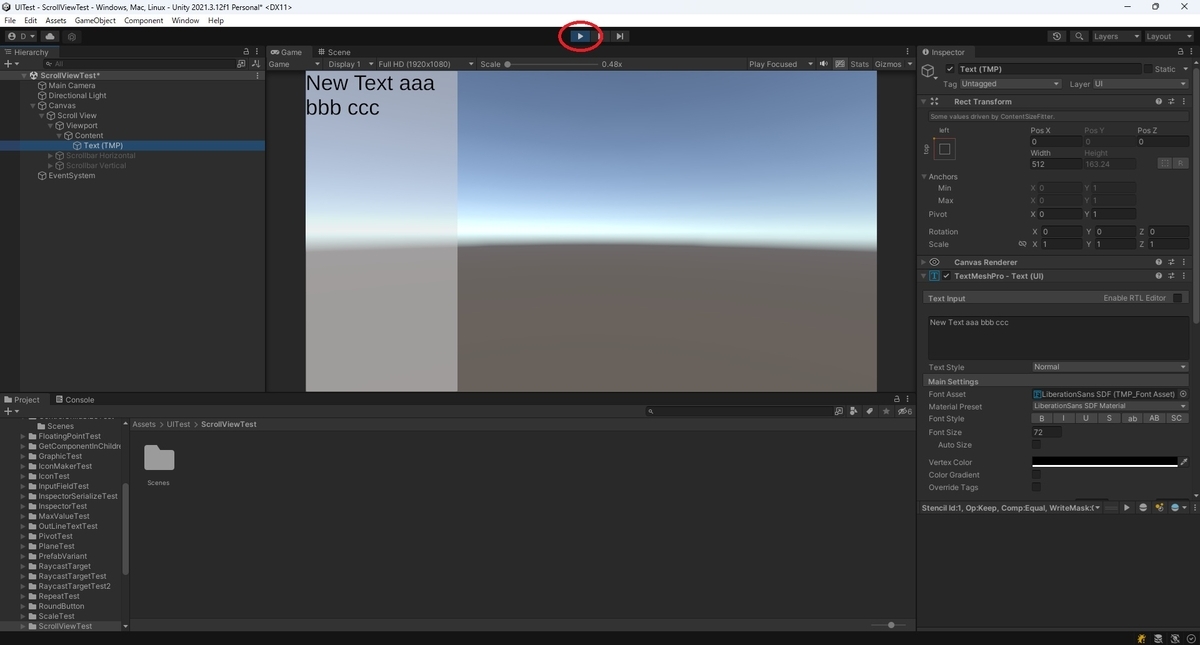
Textコンポーネントに収まりきらない文字数の文字を入力すると、Contentオブジェクトの縦サイズが自動で大きくなり、縦スクロールが有効になります。
Unityで文字数に合わせてスクロールできるScrollViewを作成できました。

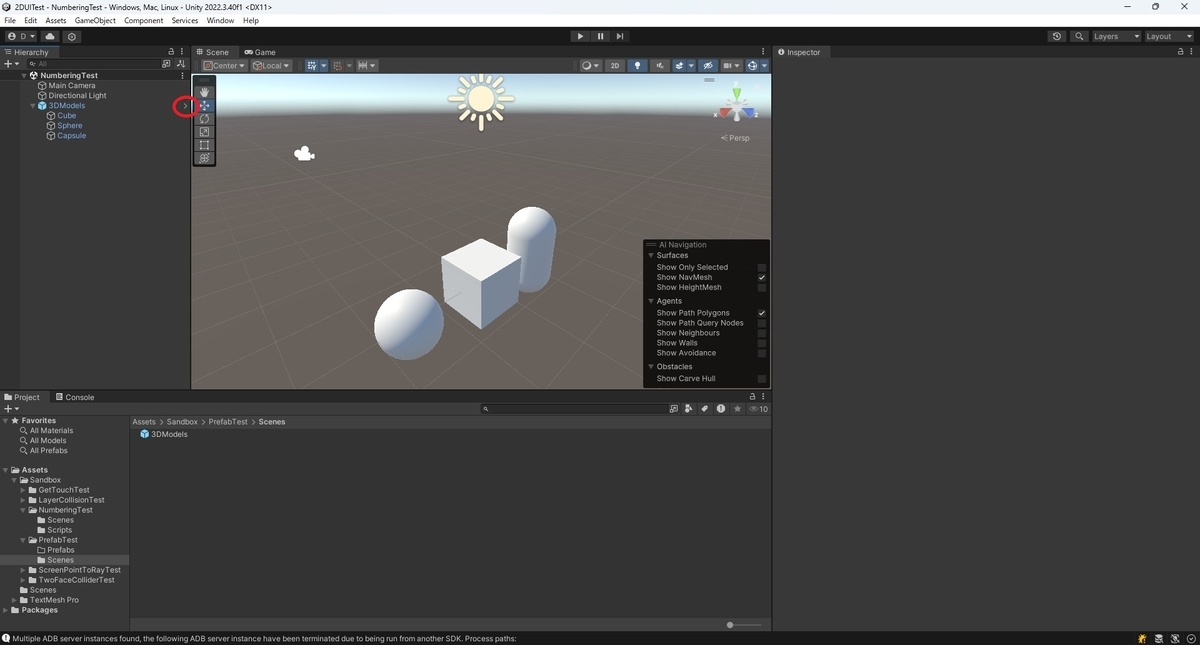
以下のようなシーン内に配置されているプレハブオブジェクトの参照元を調べます。
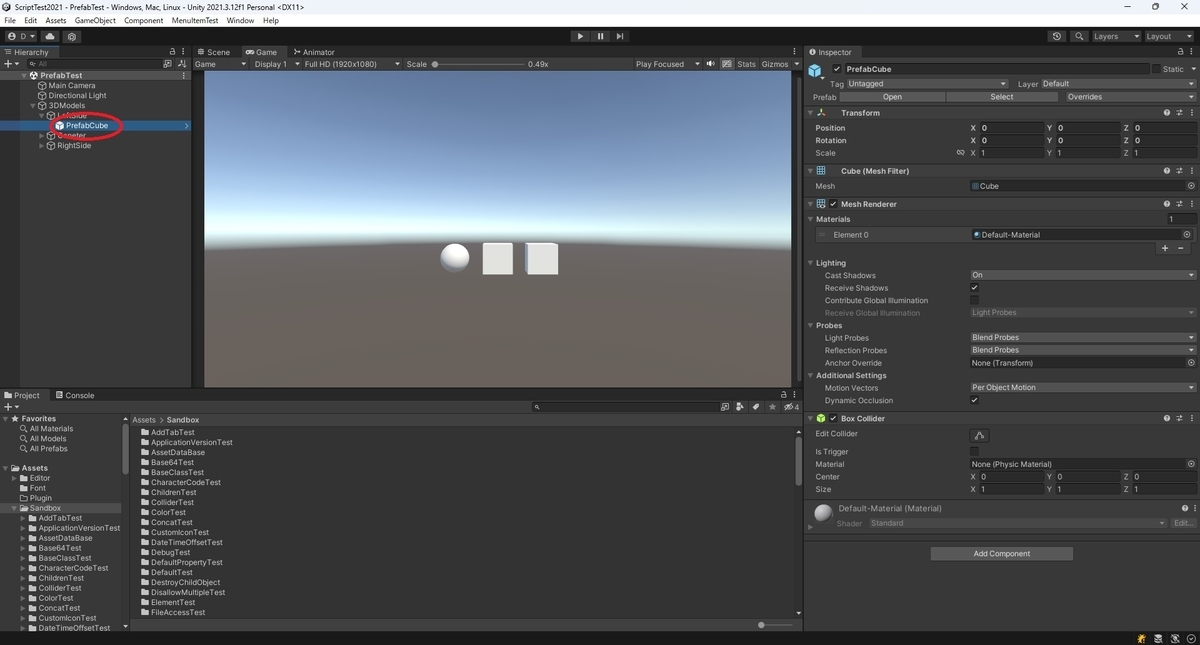
対象のプレハブを選択した状態で右クリックから[Prefab -> Select Asset]を実行します。
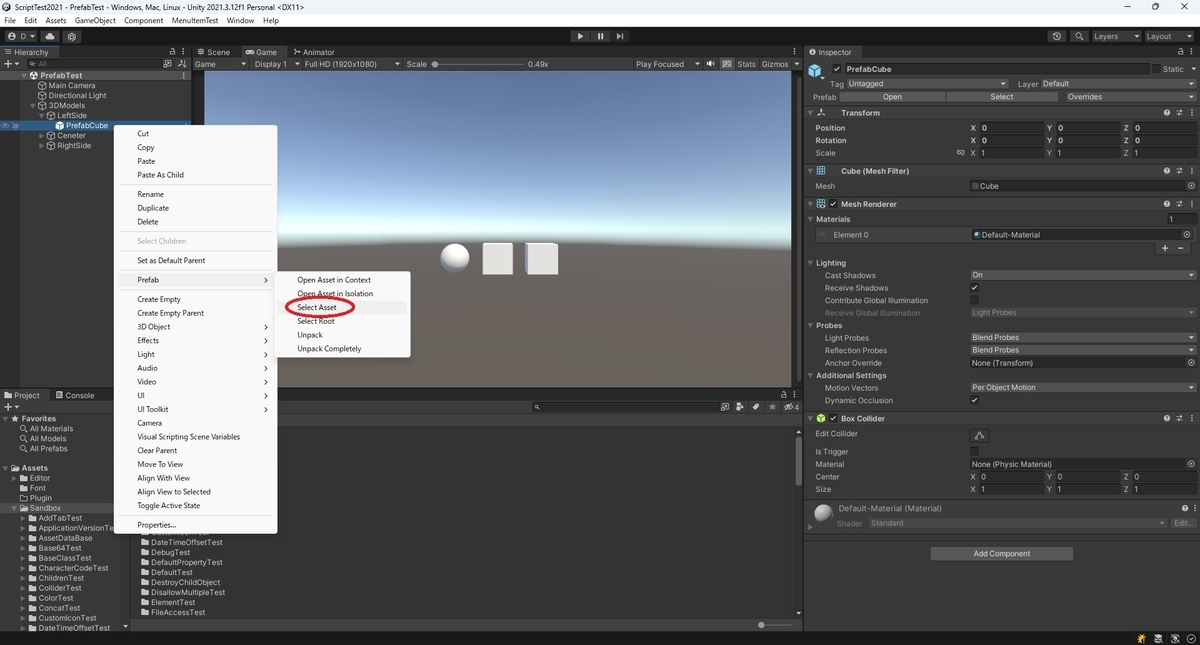
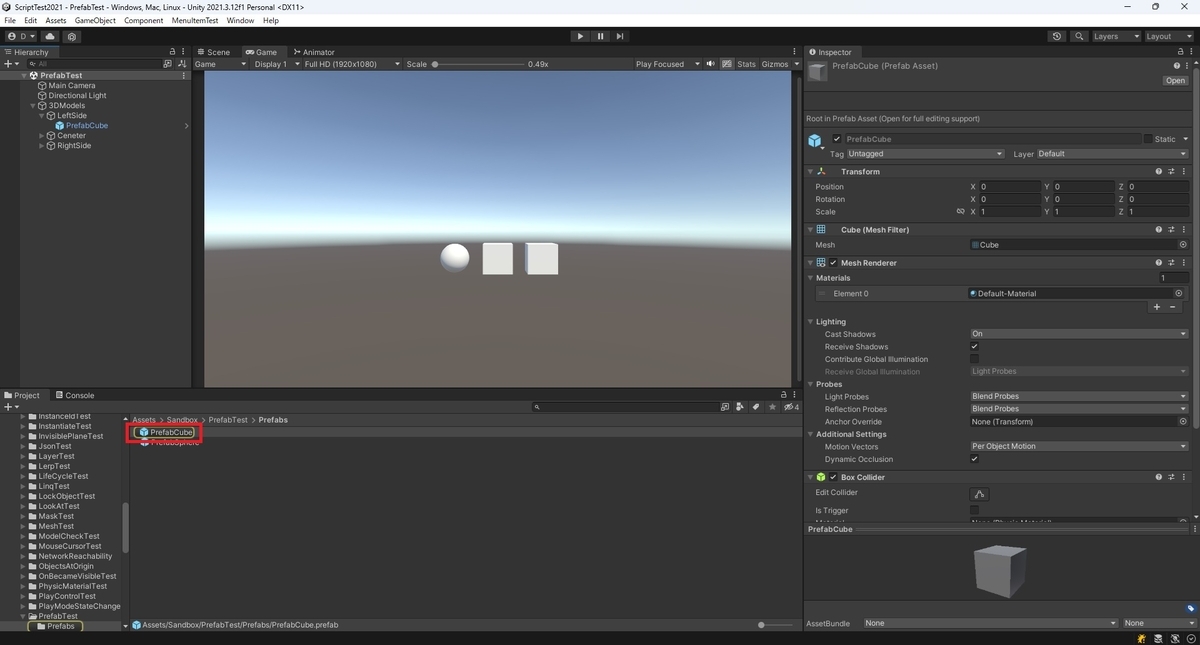
これでProjectウィンドウが遷移して参照元のアセットファイルが表示されます。
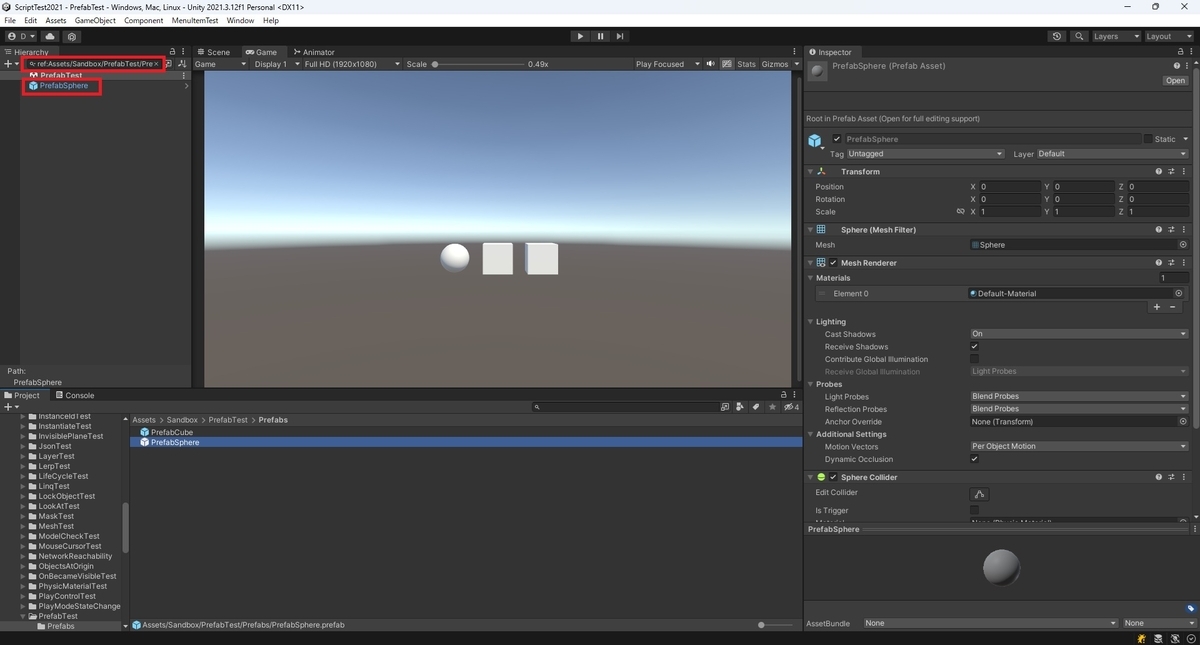
逆にアセットからシーン内の利用先を検索するにはアセットファイルを選択した状態で右クリックから[Find References In Scene]を実行します。
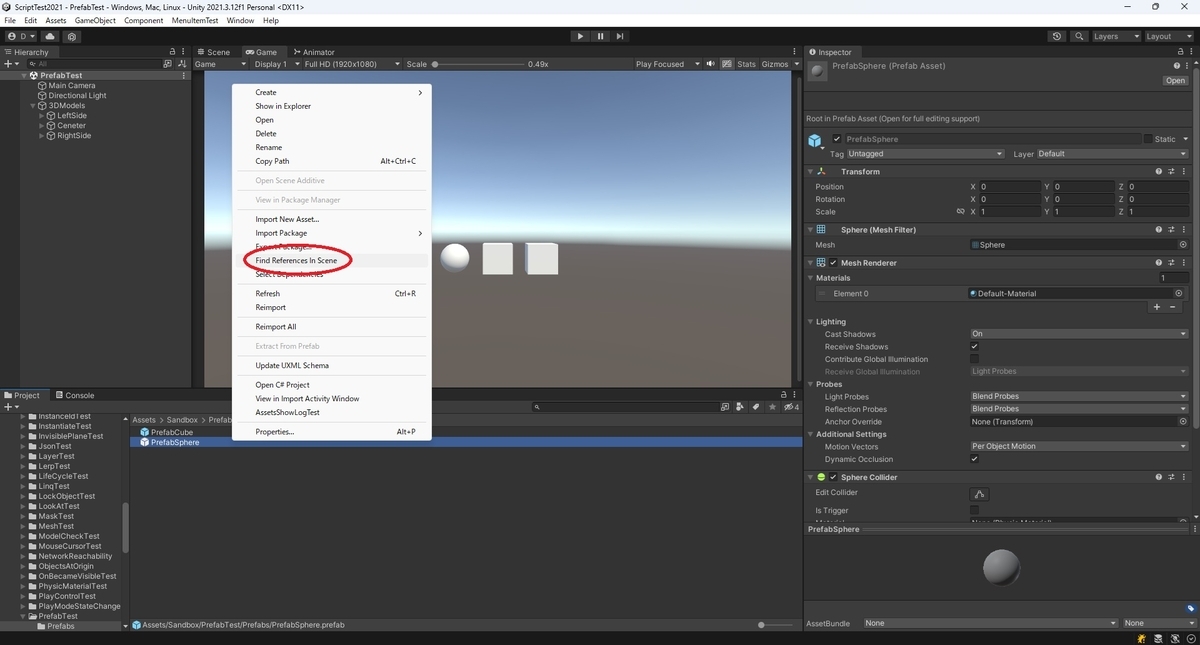
これでHierarchyウィンドウに検索ワードが入力されます。
現在開いているシーン内でプレハブが利用されている場合はオブジェクトを見つけることができます。

Vertical Layout Groupコンポーネントを利用すると子のレイアウト要素を垂直方向に調整して配置します。
本コンポーネントの設定を利用することで子要素を比率でサイズ調整できます。
docs.unity3d.com
以下の2つのScrollViewをVerticalLayoutGroupコンポーネントを使って1:2のサイズで調整してみます。

1つ上の親オブジェクトにVerticalLayoutGroupコンポーネントを追加します。

VerticalLayoutGroupコンポーネントの以下の3つの高さ調整項目すべてにチェックを入れます。
| 項目名 | 説明 |
|---|---|
| Control Child Size | レイアウトグループが子レイアウト要素の幅と高さを制御するかどうか |
| Use Child Scale | レイアウトグループが要素のサイズ調整やレイアウトを行う際に、その子レイアウト要素のスケールを考慮するかどうか |
| Child Force Expand | 付加的な使用可能なスペースを埋めるために、子レイアウト要素を強制的に拡大するかどうか |

[Use Child Scale]にチェックを入れていると子オブジェクトのサイズ調整にスケールが考慮されます。
片方のScrollViewの高さのスケールを 1 から 2 に変更してみます。

以下の通り、2つのScrollViewが1:2のサイズに自動で調整されました。

 下記のイベント・展示会への出展を予定しています。
皆様のご参加・来場をお待ちしております!
下記のイベント・展示会への出展を予定しています。
皆様のご参加・来場をお待ちしております!
イベントURL/来場登録 はこちら↓ www.nikkanseibu-eve.com
小間ブース位置:B館S-33

【展示内容】
詳細については下記よりお問い合わせください。
]]>UniRxの環境構築手順は以下の記事を参照ください。
bluebirdofoz.hatenablog.com
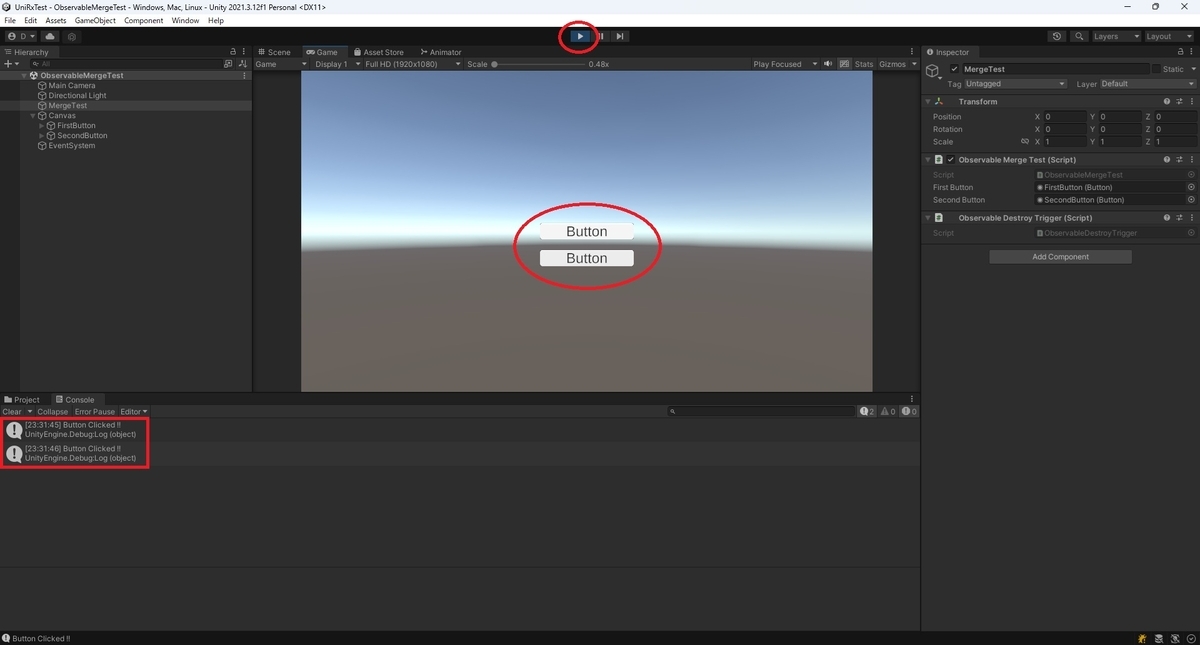
UniRxのMergeオペレータを使うことで複数のObservableを1つのストリームにまとめることができます。
IObservable<Unit> firstButtonObservable = firstButton.OnClickAsObservable(); IObservable<Unit> secondButtonObservable = secondButton.OnClickAsObservable(); Observable.Merge( firstButtonObservable, secondButtonObservable ).Subscribe(_ => Debug.Log($"Button Clicked !!"))
2つのボタンのクリックイベントに対して同様のログ出力の処理を行う以下のサンプルスクリプトを作成しました。
・ObservableMergeTest.cs
using System; using System.Collections.Generic; using UniRx; using UnityEngine; using UnityEngine.UI; public class ObservableMergeTest : MonoBehaviour { [SerializeField] private Button firstButton; [SerializeField] private Button secondButton; void Start() { List<Button> buttons = new List<Button>() { firstButton, secondButton, }; IObservable<Unit> firstButtonObservable = firstButton.OnClickAsObservable(); IObservable<Unit> secondButtonObservable = secondButton.OnClickAsObservable(); Observable.Merge( firstButtonObservable, secondButtonObservable ).Subscribe(_ => Debug.Log($"Button Clicked !!")) .AddTo(this); } }
2つのButtonコンポーネントを設定したサンプルシーンを用意して動作を確認します。

どちらのボタンを押下しても同じ処理が呼び出されることが確認できます。
以下のようにObservableから直接Mergeオペレータを記述することもできます。
IObservable<Unit> firstButtonObservable = firstButton.OnClickAsObservable(); IObservable<Unit> secondButtonObservable = secondButton.OnClickAsObservable(); firstButtonObservable.Merge( secondButtonObservable ).Subscribe(_ => Debug.Log($"Button Clicked !!")) .AddTo(this);
HelpURL属性はスクリプトに独自のドキュメントURLを指定します。
docs.unity3d.com
指定したURLはコンポーネント右上の[?]マークのアイコンから開くことができます。

HelpURL属性を指定した以下の自作スクリプトを作成しました。
using UnityEngine; // ヘルプページのURLを指定 [HelpURL("https://bluebirdofoz.hatenablog.com/")] public class PresetTest : MonoBehaviour { [SerializeField] private int presetInt = 0; [SerializeField] private string presetString = "preset"; [SerializeField] private bool presetBool = false; }
任意のオブジェクトにコンポーネントを設定し、[?]マークのアイコンをクリックします。
ブラウザが立ち上がり、指定したURLが開きます。
自作スクリプトのヘルプページがある場合はURLを設定しておくと便利です。

Inspectorビューの任意のコンポーネントの右上に[?]マークのアイコンがあります。

本アイコンをクリックすると対象のコンポーネントの公式ドキュメントページが開きます。
使用方法が不明なコンポーネントはこれで簡単にヘルプを参照することができます。

なおヘルプページは使用しているエディターバージョンのページが開きます。


異なるバージョンのドキュメントを確認したい場合は左上のプルダウンから切り替えます。

自作スプリプトはデフォルトではヘルプアイコンをクリックしても存在しないURLが開きます。


以下のHelpURL属性をスクリプトに記述することで任意のページを開くように設定することができます。
bluebirdofoz.hatenablog.com
以下の前回記事の続きです。
bluebirdofoz.hatenablog.com
プリセットをデフォルト設定として利用するにはアセットを選択し、Inspectorビューから設定を行います。
[Add to (対象コンポーネント名) default]のボタンをクリックします。

これでプリセットが対象コンポーネントのデフォルト設定として利用されるようになります。
試しにBoxColliderコンポーネントをAdd Componentから追加するとプリセットの設定で作成されました。


本設定はCubeオブジェクトなど予め用意されたオブジェクトでも有効です。
以下の通り、Cubeオブジェクトを生成した場合でもプリセットの設定が反映されたBoxColliderが適用されています。


デフォルト設定を解除したい場合は再びInspectorビューを開き、[Remove from (対象コンポーネント名) default]をクリックします。

プロジェクト全体に設定されているプリセットのデフォルト設定を確認したい場合は[Edit -> Project Settings]から[Preset Manager]タブを開きます。

プロジェクトで設定している全てのプリセットのデフォルト設定が一覧で表示されます。
本ウィンドウから登録/解除もできます。
docs.unity3d.com
Gameウィンドウはデフォルトでは[Play Focused]の設定が選択されています。

[Play Focused]はシーン再生時に自動でGameウィンドウが開きます。


本項目はプルダウンから以下の3つの設定を切り替えることができます。
| 設定名 | 説明 |
|---|---|
| Play Focused | シーン再生時に自動でGameウィンドウを開く |
| Play Maximized | シーン再生時に自動でGameウィンドウを最大サイズで開く |
| Play Unfocused | シーン再生時にGameウィンドウを開かない |
Gameウィンドウで[Play Unfocused]を選択します。

これでシーン再生時に自動でGameウィンドウが開かないようになります。


[Play Maximized]を選択している場合はシーン再生時に自動でGameウィンドウが最大サイズで開きます。

Save Selection/Load SelectionはHierarchyの選択状態を保存する機能です。
最大10パターンの選択状態を保存しておくことができます。選択状態の読み込みは同じシーンでのみ有効です。

Hierarchy上のオブジェクトを1つ以上選択した状態で[Edit -> Selection]から任意の番号の[Save Selection]を実行します。


同じシーンで保存した番号と同じ[Load Selection]を実行すると選択状態が読み込まれて反映されます。



Save Selection/Load Selectionは以下のショートカットキーで利用可能です。
ショートカットキーで本機能を利用すると任意の選択状態にすぐ戻ることができるため、作業効率が上がります。
| 機能 | ショートカットキー |
|---|---|
| Save Selection | Ctrl + Alt + (0~9の任意の番号キー) |
| Load Selection | Ctrl + Shift + (0~9の任意の番号キー) |
Save Selection/Load Selectionは対象のシーンを開いている間のみ保持されます。
プロジェクト設定としては保存されていないため、エディターを再起動すると全てのSelectionがクリアされます。

また別シーンに移動すると元シーンに戻っても異なるシーンと見なされるのかLoad Selectionによる反映ができなくなります。
以下の前回記事の続きです。
bluebirdofoz.hatenablog.com
プリセットの内容を編集する場合はアセットを選択し、Inspectorビューから編集を行います。

この場合、プリセットを適用すると変更を行っていない項目を含めて全ての項目の設定が反映されます。

反映したくない項目がある場合はInspectorビューの項目を右クリックして[Exclude Property]を実行します。

[Exclude Property]を実行した項目には除外項目を示す赤い線が表示されます。

プリセットを適用すると除外項目は反映されず、それ以外の項目のみ設定が反映されます。
本機能を利用することでコンポーネントの一部の設定のみ保存/適用するプリセットが作成できます。

プリセットは任意のプロパティ設定を保存/適用するための機能です。
docs.unity3d.com

ホロラボはこの夏にいくつもの子供向けイベントへ技術提供/出展をしてきました。
その中でも、私たちもとても楽しむことのできた取り組みの事例を紹介します。
2024年8月12日(祝・月)に開催された小学生向けイベント「Minecraftで未来の丸の内をデザインしよう!」にて、ホロラボが開発したXR技術を用いたデジタルツインプラットフォームtorinome(トライノーム)(*1) を活用し、子供たちがマインクラフトで建築した建物を、現実の丸の内ストリートにARで具現化しました。
「Minecraftで未来の丸の内をデザインしよう!」イベントは、Minecraftカップ運営委員会と大手町・丸の内・有楽町 エコキッズ探検隊と株式会社ホロラボでの共同で開催され、会場はMinecraftカップ運営委員会のシルバーパートナーの三菱地所様のスペースにて実施されました。
現実への具現化の流れは大まかに次の通りになっていました。

当イベントを実施した際のプレスリリース記事はこちら prtimes.jp
現実の丸の内にARで具現化された自分の建物に興奮した子供たちは、我先にとiPadの取り合いになりましたし、iPadを手にした瞬間に全力で自分の建てた建物の位置まで走る(300~400mくらいの広範囲に建設したので)など、それについていく大人たちも汗だくになって大変でした笑
お子さんと一緒に参加していたお父さんお母さんからもとても関心を得られ、質問攻めにあいながらも子供たちも追いかけないといけないという、まさに嬉しい悲鳴を上げた1日となりました。
2024年8月7日(水)、8日(木)の二日間に開催された「こども霞が関見学デー」(*3)にて、子供たちが現実のレゴで作った建物をデジタルツイン上の霞が関に建てるという試みを実施しました。
ホロラボは国土交通省にて、PLATEAUプロジェクトの紹介コーナーの一部として、このレゴで建物を作るデジタルツイン体験ブースを提供していました。
企画の背景として、国土交通省が推進するPLATEAUプロジェクトにおいて、霞が関周辺だけPLATEAUの建物データが存在しない状態になっています。

このぽっかりと開いた霞が関の空間に、子供たちで好きな建物や省庁を建ててみよう!というのが、この企画の発端です。
レゴのデジタルデータ化にはScaniverseという無料の3Dスキャンアプリを活用しました。
出来上がったレゴをスタッフでスキャンして3Dデータ化して、それをデジタルツインプラットフォームtorinome Web上に設置。
自分の建物がtorinome Web上の霞が関付近の好きな場所に置かれている様子を、モニター背景に一緒に写真を撮ったりなどして楽しんでいただきました。




当日は実施しませんでしたが、これらのtorinome Web上に設置されたデータは、現実のその場所(つまり霞が関)に行って専用のiPadアプリで覗くだけで、実物大のARで具現化することが容易にできます。
torinome Web上でサイズを自由に変えることができるので、レゴで作った建物を人が入れる大きさにすることも自由にできますし、ARで実際にその建物の中に入ってみることもできちゃいます。
子供たちの中には霞が関を無視して、皇居にお花のお家を建てる子や、海の上に家を建てた子もいました笑
鉄道好きの子は、かつて存在していた鉄道省を東京駅前の広場に建ててみたりと、大人でもびっくりな発想や知識に驚かされ続ける1日となりました。
torinomeは、3Dデータさえあればそれをtorinome Web上の地図の上に置くだけで簡単にその場所にARで具現化することができるデジタルツインプラットフォームですが、そもそもその3Dデータを持っていなかったり、作ることができない人が多いというのが利用者の一つの課題でした。
しかし今回の事例のように、誰でも簡単に作ることができるのであればその問題は一気に解消されます。
マインクラフトは現時点では歴史上世界で最も多く売れたゲームでもあり、最近の子供たちは誰もが遊んだことがあり簡単に扱うことができます。 レゴに関しては大人でも直感的に好きな形を作り上げることができる、世界中で愛されているブロック玩具です。
誰もが扱うことのできる道具で創造したものが、現実の世界へと具現化される。 とても単純なようでとても新しい体験を可能としたデジタルツインプラットフォームtorinomeの、新しい価値を発見したかのような体験の日々でした。
株式会社ホロラボは、XR技術を駆使したプロジェクトやプロダクトの創出に力を入れています。当イベントには未来のエンターテインメントを牽引する才能ある子供たちが集結し、新たなXR体験を生み出す場となるよう技術支援をいたしました。 今後も株式会社ホロラボはXRテクノロジーの進化を推進していきます。
*1: torinome(トライノーム)とは
torinomeは、XR技術を用いたデジタルツインマルチプラットフォームです。
Webアプリケーションとしてブラウザで動作するtorinome Webは、Web3Dの新しいGISです。国土交通省が推進するProject PLATEAUで整備、提供される3D都市モデルを始めとして、その他にも多様な形式のGIS、画像、動画、3Dモデルを3Dの地球儀上に重畳表示が可能です。
そしてtorinome AR(iPadアプリ)は、torinome Webの地図上に設置された3Dデータを、現実世界のその場所へ実物大サイズでARによる具現化が可能です。torinome Webの地図と現実の位置が自動でリンクするデジタルツインを実現しているため、現実世界での手動での位置合わせは不要です。
*2: PLATEAU(プラトー)とは
PLATEAUは、国土交通省が推進しているプロジェクトで、日本全国の都市を3Dモデル化し、オープンデータとして公開する取り組みです。この3D都市モデルは、都市計画や防災シミュレーション、映像制作など、さまざまな分野で活用されています。これらのデータは無償で公開されており、誰でも利用することができます。
*3: こども霞が関見学デーとは
夏休み期間中に子供たちが霞が関の各府省庁を見学し、政府の仕事や社会の仕組みを学ぶイベントです。
親子で参加でき、さまざまな体験プログラムや展示が用意されています。
以下のColliderコンポーネントはInspector上の[Edit Collider]から当たり判定の形状を調整できます。
・BoxCollider
・CapsuleCollider
・SphereCollider

MeshColliderは[Mesh]変数のメッシュ形状を参照するため、[Edit Collider]での編集はできません。

[Edit Collider]を有効にすると、Colliderにハンドルが表示されます。
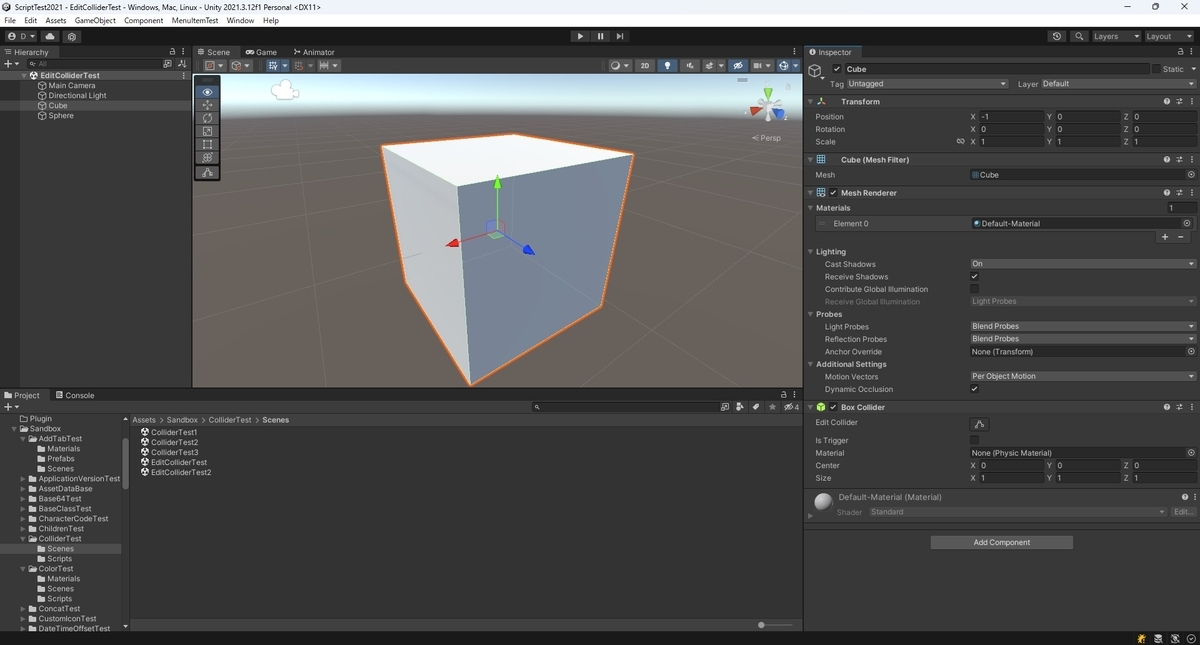

ハンドルを掴んで移動することでColliderの形状を編集できます。


ただし変形の自由度はあまり高くありません。
Sphereなどは半径が調整されるだけなどその他の編集項目で調整可能な範囲に限られます。


MRTKのビジュアルプロファイラーはアプリケーション内で表示可能なパフォーマンスの診断ツールです。
ProfileでDiagnosticsを有効にしておくとアプリケーション内で常に表示され、リアルタイムにパフォーマンスの確認を行えます。
learn.microsoft.com

スクリプトからビジュアルプロファイラーにアクセスするにはCoreServices.DiagnosticsSystemを参照します。
以下のコードでビジュアルプロファイラーの表示状態を切り替えることができます。
bool onOff = true; if (CoreServices.DiagnosticsSystem != null) CoreServices.DiagnosticsSystem.ShowProfiler = onOff;
ビジュアルプロファイラーの表示をスクリプトから切り替える以下のサンプルスクリプトを作成しました。
・DiagnosticsSwitchTest.cs
using Microsoft.MixedReality.Toolkit; using UnityEngine; public class DiagnosticsSwitchTest : MonoBehaviour { public void SwitchDiagnostic(bool onOff) { if (CoreServices.DiagnosticsSystem != null) { // ビジュアルプロファイラーの表示を切り替える CoreServices.DiagnosticsSystem.ShowProfiler = onOff; } } }

シーンにトグルボタンを追加し、トグルのON/OFFに合わせてサンプルスクリプトを呼び出すようにします。

以下の通り、シーン中にビジュアルプロファイラーの表示を切り替えることができました。


なおスクリプトから切り替える場合は新規プロファイルを作成する必要はありません。

 下記のイベント・展示会への出展を予定しています。
皆様のご参加・来場をお待ちしております!
下記のイベント・展示会への出展を予定しています。
皆様のご参加・来場をお待ちしております!
※併催「CEATEC2024」の来場登録でも本イベントに入場いただけます

【展示内容】
詳細については下記よりお問い合わせください。
]]>
Unity Awards は、クリエイターのコミュニティが一堂に会し、創造性、影響力、卓越性をグローバルに称えるアワードです。世界中の Unity コミュニティと一緒にノミネートして、Unity クリエイターの優れた功績を称えましょう。(公式サイトより引用)
西松建設株式会社様と共同研究を行った、 GNSS連携したドローンで現場でのマーカー位置合わせを不要にし、空撮映像と3Dモデルをリアルタイムに重畳、ヘッドマウントディスプレイと連携して施工の可視化、ドローンの操縦支援を行なうプロジェクトがノミネートされました。 プロジェクトの詳細については下記プレスリリースを参考ください。 prtimes.jp
2024 年 9 月 19 日~ 10 月 4 日の一般投票期間を経て、2024 年 10 月 23 日午後 7 時(中央ヨーロッパ時間):Unity の Twitch チャンネルで各賞受賞者発表される予定です。
※Industry部門は今年度より新設された部門で、本部門には一般投票はありません。
]]>
イベントでは執筆者と編集者によるトークセッション、特別ゲストのSpatial Artistせきぐち あいみさんのパフォーマンス、サイン会など大きなトラブルもなく盛況に終えることができました。



イベント参加者にはApple Vision Proのバッテリーを入れるのにぴったりなバッテリーホルダーを参加特典として配布しました。


書籍「Apple Vision Proアプリ開発入門」購入者向けの次回のイベントは9/18(水)と9/21(土)に開発イベント「執筆者と一緒に『Apple Vision Proアプリ開発入門』をもくもくする会」を予定しています。
このイベントでは、『Apple Vision Proアプリ開発入門』を実際に手を動かしながら読み進めていくイベントでわからないことはその場で書籍執筆者に質問できるイベントです。 また、Apple Vision Proを持っていない場合でもホロラボ所有のApple Vision Proを使って開発したアプリケーションを試すこともできますので、Swift初学者の方から熟練者の方まで広くご参加いただけます。
皆様のご参加お待ちしています。
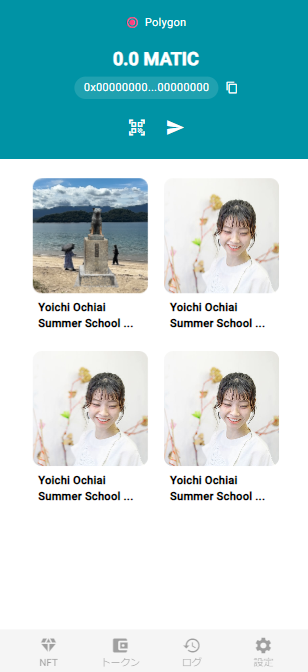
]]>サマースクール期間中に参加者が制作した作品は「Spatial Curator」を通して「体験データ」として実空間に配置することができ、それと同時にNFTとして参加者のウォレットに紐づけられます。 また同じく「Spatial Curator」を通すことで、それらの「体験データ」を他の参加者は追体験として閲覧することができます。 スマートコントラクト技術の導入により、「体験データ」が閲覧される度にその「体験データ」制作者に対して限定動画の視聴などができる権利のついたNFTが報酬として自動的に配布されます。
このアプリで採用された技術的な要素について解説していきます。
イベントの詳細についてはこちらを参照
Table Unstable https://tableunstable.org/
ホロラボ、電通グループと「地理空間連動NFT」による実証実験でARアプリを開発 https://prtimes.jp/main/html/rd/p/000000103.000023638.html
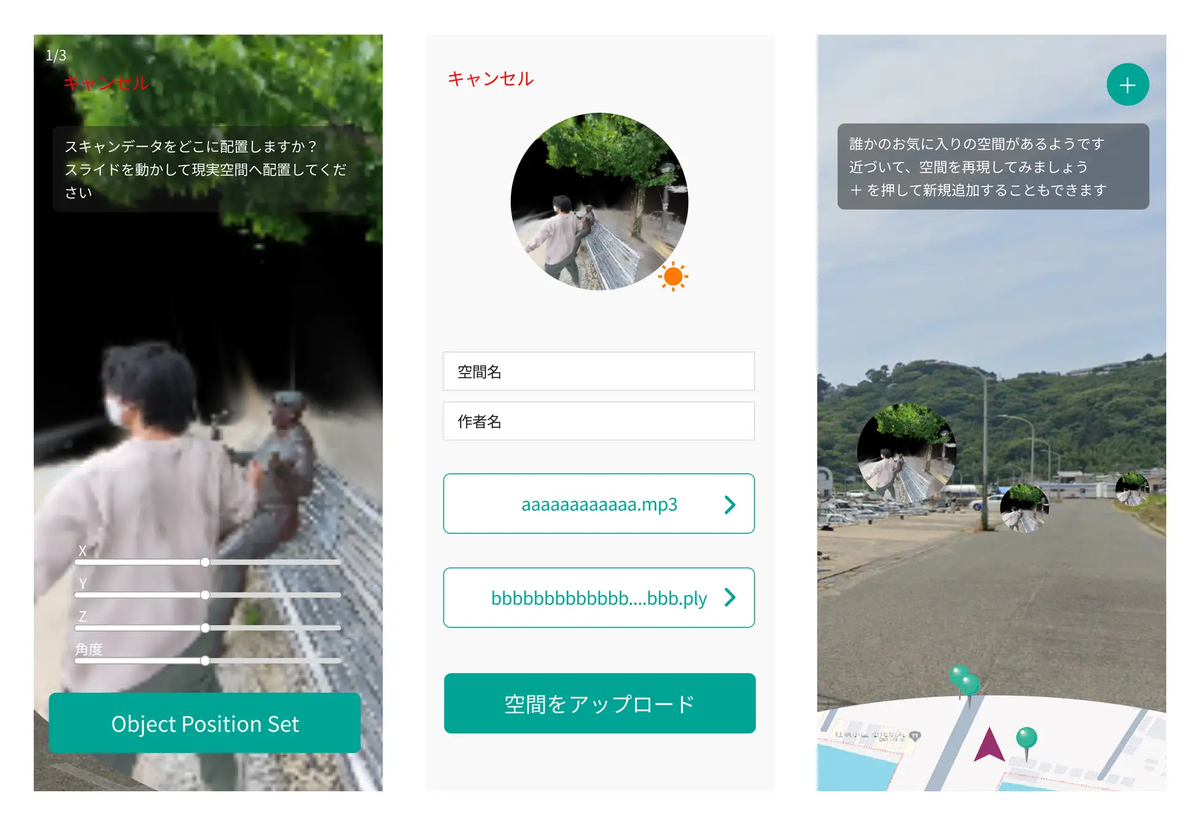
3D Gaussian Splatting(以下3DGS)によってデジタル化された3Dコンテンツを音楽データと合わせた「体験」として、Spatial Curatorを通して特定の場所に配置することができます。 配置された体験データはNFT化され、その体験データを他のユーザーがSpatial Curatorを通じて追体験する度に、制作したクリエイターに対して報酬としてのNFTがスマートコントラクト技術によって配布されます。
また時間帯や天気などの状況が屋外での空間体験に大きく影響を与えることを考慮し、天気APIから当時の天候を自動取得して表示することで、実際の天候と比較しながら追体験ができるようにしています。
Project Spirare はホロラボが開発を行っている OSS プロジェクトです。 Project Spirare では特定のゲームエンジンやアプリケーションに依存しない 3D コンテンツ用フォーマットである POML の仕様作成と、POML の作成や表示を行うためのライブラリやアプリケーションの作成を行っています。
Project Spirare についての詳しい情報は、2024/4/18 に実施された HoloLab Conference 2024 のセッションアーカイブをご覧ください。 www.youtube.com
今回のアプリケーションでは、Project Spirare において実装された以下の機能をライブラリとして利用しています。
3DGS の表示は高橋啓治郎さんが作成された SplatVFX をベースに実装しています。 SplatVFX では Visual Effect Graph (VFX Graph) を使って Splat の表示が行われています。
Geospatial API は Google が提供する VPS です。 アプリケーションにライブラリを組み込むことで、端末のセンサーデータ・GPS データ・カメラ画像を利用し、端末の緯度経度や向きを取得することができます。 Google ストリートビューのデータが利用されており、ユーザーによる VPS マップ作成は不要です。
詳しい情報は以下の公式ドキュメントをご覧ください。 https://developers.google.com/ar/develop/geospatial?hl=ja
Firebase は Google が提供するモバイルおよびウェブアプリ開発プラットフォームです。 今回のアプリケーションでは、画像・3DGS データ・音楽データといったデータファイルの保存に Cloud Storage for Firebase を利用しています。 また、体験データの情報(タイトル・作成者・配置位置など)の保存に Cloud Firestore を利用しています。
空気感再現のひとつとして記録している天気に関する情報は「Free Weather API」を使用して取得しています。
体験データ作成時の位置情報(緯度/経度)を元にその地点のリアルタイムの天気情報を取得し、「晴れ」や「雨」といった天候を表す天気コードを元にアイコンを表示。体験データの一部としてその天気コードを保存しておきます。

リアルタイムの天気情報を取得した例はこちら。
{
"location": { "name": "Tokyo", "region": "Tokyo", "country": "Japan", "lat": 35.69, "lon": 139.69, "tz_id": "Asia/Tokyo", "localtime_epoch": 1723704025, "localtime": "2024-08-15 15:40" }, "current": { "last_updated_epoch": 1723703400, "last_updated": "2024-08-15 15:30", "temp_c": 34.1, "temp_f": 93.4, "is_day": 1, "condition": { "text": "Partly cloudy", "icon": "//cdn.weatherapi.com/weather/64x64/day/116.png", "code": 1003 }, "wind_mph": 11.9, "wind_kph": 19.1, "wind_degree": 110, "wind_dir": "ESE", "pressure_mb": 1005.0, "pressure_in": 29.68, "precip_mm": 0.0, "precip_in": 0.0, "humidity": 60, "cloud": 75, "feelslike_c": 37.9, "feelslike_f": 100.1, "windchill_c": 34.3, "windchill_f": 93.7, "heatindex_c": 38.2, "heatindex_f": 100.8, "dewpoint_c": 20.9, "dewpoint_f": 69.5, "vis_km": 10.0, "vis_miles": 6.0, "uv": 8.0, "gust_mph": 13.6, "gust_kph": 22.0 }}
体験としてアップロードする音楽ファイルはiPhoneの「ファイル」アプリ内に格納されたmp3ファイルが対象となります。 「ファイル」アプリからのmp3ファイルの選択する機能はNative File Picker for Android & iOSを使わせてもらいました。
Native File Picker for Android & iOS | Integration | Unity Asset Store
また音楽ファイルのみで3DGSファイルをアップロードしない場合、サムネイルとして任意の画像ファイルを選択するという仕様となっています。ここで使用するサムネイル画像はNative Gallery for Android & iOSによって「写真」アプリ内から選択できるようにしています。
Native Gallery for Android & iOS | Integration | Unity Asset Store
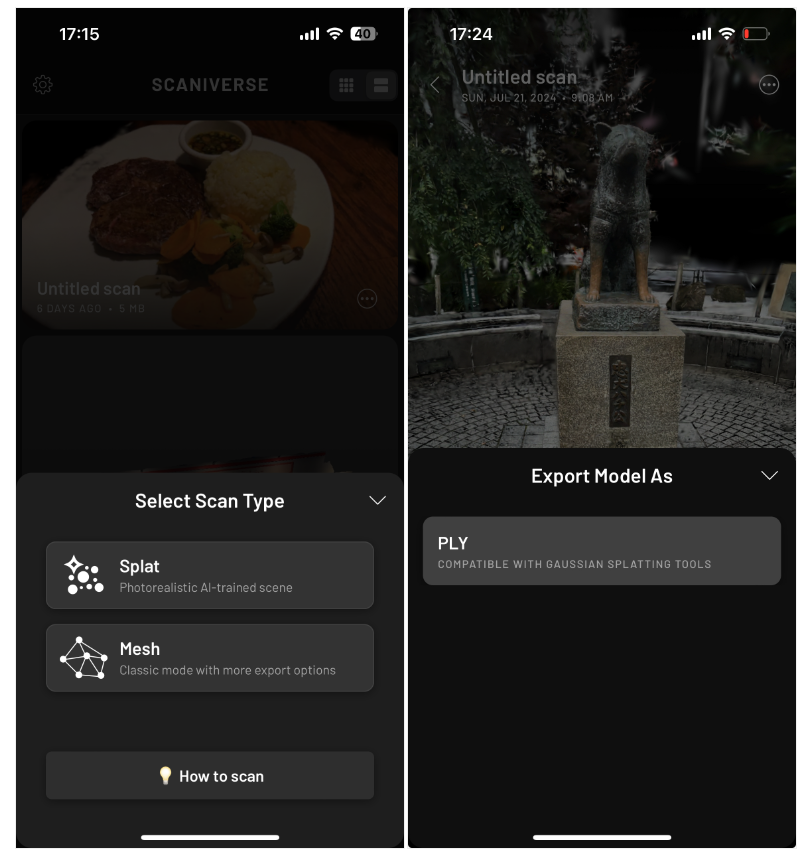
体験データに使用する3DGSのデータの作成はiPhone用スキャンアプリ「Scaniverse」を推奨として参加者に使用していただきました。

ほとんどの参加者が「Scaniverse」を初めて使うようでしたが、サマースクール期間中にレクチャーする機会もあり、みなさん自分ならではのスキャンをして3DGS作品を作成していました。
今回開発した「Spatial Curator」はVPS、3DGS、NFT、スマートコントラクトなど様々な技術を組み合わせたアプリとなりました。 ひとつひとつの技術の中身は複雑な仕組みではありますが、OSSや各種ライブラリを活用することで比較的容易に組み込むことができました。 サマースクール参加者にもこのアプリを通じて新しい技術に触れていただけたと思います。(文章:田野、古田)
]]>
2024年8月1日(木)~2日(金)にパシフィコ横浜で開催した Google Cloud Next Tokyo '24 のアーカイブが公開されました。 cloudonair.withgoogle.com
ホロラボからは「torinome」の開発事例について、清水、上田、丸山がブレイクアウトセッションに登壇しました。
※「torinome」は、地球上の位置に紐づいた情報を蓄積し、視覚化・共有できる Web アプリケーションとして Google Cloud を活用して開発しています。
このセッションでは、開発中に直面した課題を Google Cloud サービスを用いてどのように解決したのかを紹介しました。まちづくりや都市デジタルツインに興味のある方も、ぜひご覧ください。

また、「Google Cloud Next Tokyo」は、Google Cloudの最新情報やベストプラクティスが知れるため、とても楽しいイベントでした。次回の「Google Cloud Next Tokyo」は 2025年8月5日(火)~6日(火) に 東京ビッグサイト 南展示棟 で開催予定ですので、みなさんも是非機会があれば足を運んでみてください。(文章:上田)
]]> Unity Asset Storeにホロラボのストアを開設しました。
今後弊社で制作した3Dモデルなどの素材を公開予定です。
Unity Asset Storeにホロラボのストアを開設しました。
今後弊社で制作した3Dモデルなどの素材を公開予定です。
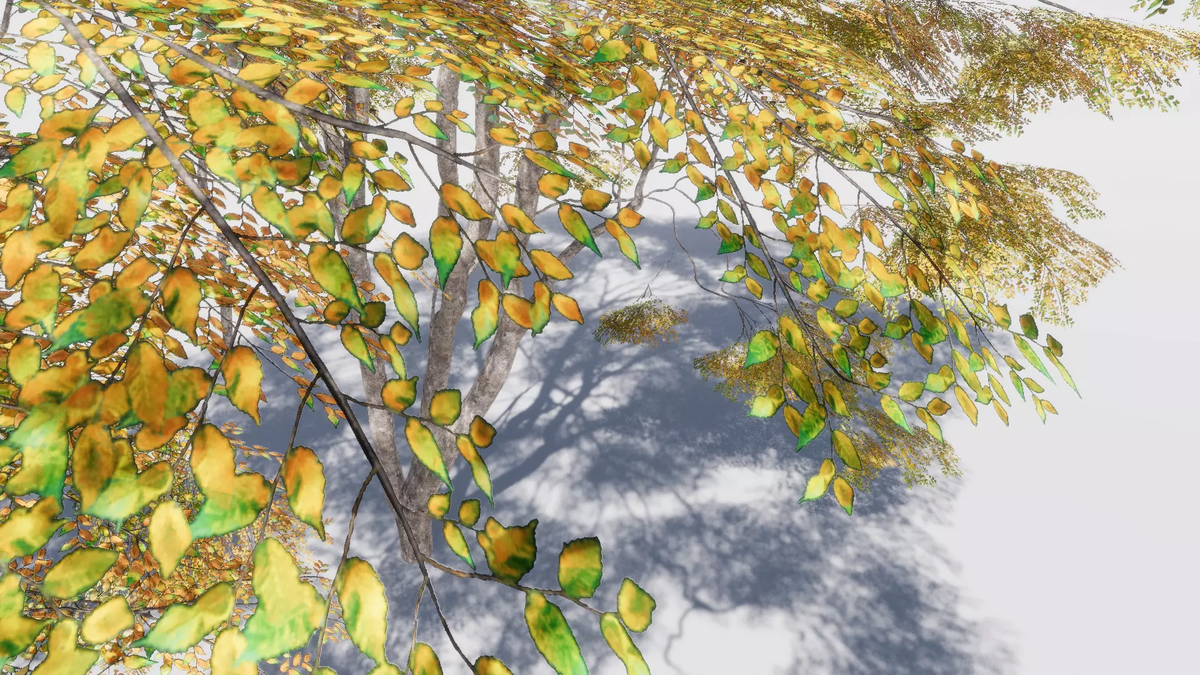
日本の樹木、カエデのモデルです。
高精度の地上型3Dレーザスキャナによって計測されたデータ(点群データ:PointCloud)を基に作成された、登録有形⽂化財「沖本家住宅」(東京都国分寺市)に自生するカエデの3D樹木モデルとなります。緑葉・紅葉の3D樹木モデルを提供いたします。
本手法によって作成される3D樹木モデルは実測に基づいており、かつ、樹木の点群データから3Dモデル化を行うためのアルゴリズムの使用により、実物に近い樹形の再現性を可能としております。
本モデルの収益の一部は沖本家住宅に還元いたします。
日本の樹木、ケヤキの3Dモデルです。
高精度の地上設置型レーザースキャナによる実測に基づいています。
レーザースキャンデータからの3Dモデル化に独自のアルゴリズムを使用する事で、非常に詳細な幹と枝の形状が再現されています。
葉のテクスチャは実物を撮影したものをベースとしており、表面用と裏面用とそれぞれ専用のテクスチャを有しています。
形状とテクスチャ共に写実的な樹形表現を可能としております。

ぜひお試しください!
]]>普段はガチめの広域フォトグラメトリ&3D Gaussian Splattingやってる人ですが、旅先で広い範囲を撮影する場合は時間も限られているので360度カメラで撮影した動画や写真を使っちゃう場合もあります。
 (観光がてらの撮影なのに作業着と反射ベストも持っていった人。安全第一)
(観光がてらの撮影なのに作業着と反射ベストも持っていった人。安全第一)
一眼カメラの撮影やレーザースキャンでのスキャンに比べて圧倒的に効率的!
その分品質は劣りますが。


この記事ではそうして撮影した360度素材を元にSfMする(からのフォトグラメトリや3Dガウシアンスプラッティングする)手段と手順についてまとめてみました。
前半でいくつかの手法を紹介、後半で具体的な手順を紹介します。
| 価格 | インターフェース | |||
| 無料利用可能 | 有料のみ | コマンドラインのみ | GUI | |
| Metashape | ◯ | ◯ | ||
| 3DF Zephyr | ◯ | ◯ | ||
| FFmpeg | ◯ | ◯ | ||
| Meshroom | ◯ | ◯ | ||
| 360-to-planer-images | ◯ | ◯ | ||
| Unity Recorder | ◯ | ◯ | ||
| DaVinci Resolve | ◯ | ◯ | ||
| Premiere Pro | ◯ | ◯ | ||
| PTGui | ◯ | ◯ | ||
対応しているソフトを使っちゃうのが最も簡単。

 Metashape
Metashape全天周画像(エクイレクタングラー)に対応しているのでそのまま処理できます。
特徴点が少ない上に超狭小空間といったケース(エレベーター内とかトイレ内とか)だと普通のカメラで撮影した画像からフォトグラメトリするのは困難な場合も多いで、360°撮影+Metashape処理という組み合わせは業務でも予備として採用しているワークフローです。
公式の解説ページはこちら。
 3DF Zehpyr
3DF Zehpyrこちらも全天周画像(エクイレクタングラー)を読み込むことができますが、Metashapeとは異なりそのまま処理するのではなく展開した画像が切り出されその画像が使われます。
切り出す際は方向(上下左右前後)と画角が指定できます。
参考記事: 3DF Zephyrで360度ビデオを直接取り込んでフォトグラメトリを行う
画像として切り出されるのでその画像を他のソフトで利用することも可能です。
全天周画像の状態から各方向に歪みを補正した状態の画像に切り出す方法です。
切り出した後はお好みのフォトグラメトリ/3D Gaussian Splatting/NeRFのソフト等で利用できます。

数が多いので前半では各種手法と参考記事を紹介。
言わばリンク集。
みなさまの記事に感謝!
「CUI」とつけたものはコマンドラインツールです。
コマンドラインツールの利用が難しい場合は「GUI」の方を利用してみてください。
後半では参考記事の内容を参考にしつつ一部をより具体的に手順編としてまとめました。
 FFmpeg (CUI)
FFmpeg (CUI)参考記事: 360°動画からフォトグラメトリで現場を3Dモデル化する話
詳しい手順は後述します。
 Meshroom の aliceVision_utils_split360Images (CUI)
Meshroom の aliceVision_utils_split360Images (CUI)参考動画: 360 Photogrammetry [Reality Capture]
詳しい手順は後述します。
 360-to-planer-images (CUI)
360-to-planer-images (CUI) Unity Recorder (GUI)
Unity Recorder (GUI)参考記事: パーソナルユース版・Insta360OneXの動画を使ったフォトグラメトリ
 DaVinci Resolve (GUI)
DaVinci Resolve (GUI)参考記事: DaVinci Resolveで360度映像を16:9にリフレームする
参考記事: DaVinci Resolveでの360度動画の手ブレ補正とリフレームをする方法
 Premiere Pro + GoPro FX (GUI 有料ソフト)
Premiere Pro + GoPro FX (GUI 有料ソフト)参考動画: 360カメラ映像からフォトグラメトリで3Dモデルを生成してVRChatまで持っていく配信
詳しい手順は後述します。
 PTGuiを使う (GUI 有料ソフト)
PTGuiを使う (GUI 有料ソフト)参考記事: Insta360OneXの動画を使ったフォトグラメトリ
上記で紹介した手法のうちいくつか具体的な使い方を以下にまとめました。
ちなみ私は使い勝手の良さから普段はFFmpegを利用しています。
 FFmpeg を使う場合
FFmpeg を使う場合FFmpegのv360を使うと切り出す方向や画角等を細かく指定できるので、どのように切り出すとフォトグラメトリ(SfM)がうまくいくのかトライアンドエラーするのにも便利です。
v360のドキュメントはこちら。
使い方は以下のとおりです。
参考記事: FFMPEGをWindowsパソコンにインストールしよう
私はAnacondaを使用しているので以下のように環境を作成しました。
まずAnaconda Promptを起動。

v360という名前の仮想環境を作成。名前はわかりやすければ何でも良いです。
conda create -n v360 python=3.10
作成した仮想環境をアクティブにする。
conda activate v360
参考記事: PythonとFFmpegで長時間の動画を短く分割しよう
condaの場合はインストールコマンドはこちら。
https://anaconda.org/conda-forge/ffmpeg-python
conda install -c conda-forge ffmpeg-python
こちらのサイトを参考にさせていただきつつ(感謝!)、私の用途にも使いやすいよう少し内容を変更しました。
パスやファイル名に具体的な名前が入っていますが適宜変更してください。
import subprocess
import os
# 動画を保存しているフォルダ 作業フォルダ
path = r'I:\Scans\20240609_OsakaCastle\_Export' + '\\'
# ファイル名 (拡張子は含まず)
filiname ='VID_20240609_173041_00_001'
# 拡張子名
extension ='mp4'
# 出力フォルダ (なければ作る)
output_path = fr'{path}Export' + '\\'
os.makedirs(output_path, exist_ok=True)
input_file_path = f'{path}{filiname}.{extension}'
# 視点リスト(yaw,pitch,roll)
#'''
# 8方向
transforms = (
( 0, 0,0),
( 45, 0,0),
( 90, 0,0),
( 135, 0,0),
( 180, 0,0),
(-135, 0,0),
( -90, 0,0),
( -45, 0,0),
)
#'''
'''
# 8方向+見上げ4方向
transforms = (
( 0, 0,0),
( 0, 20,0),
( 45, 0,0),
( 90, 0,0),
( 90, 20,0),
( 135, 0,0),
( 180, 0,0),
( 180, 20,0),
(-135, 0,0),
( -90, 0,0),
( -90, 20,0),
( -45, 0,0),
)
'''
'''
# 12方向
transforms = (
( 0, 0,0),
( 30, 0,0),
( 60, 0,0),
( 90, 0,0),
( 120, 0,0),
( 150, 0,0),
( 180, 0,0),
(-150, 0,0),
(-120, 0,0),
( -90, 0,0),
( -60, 0,0),
( -30, 0,0),
)
'''
# 画像切り出しのフレームレート 撮影時の移動スピードや対象物からの距離をみて調節
fps = 2
# 明るさ調整 (ただしコントラストが落ち階調も失われるので次のガンマ調整を使った方が良さそう)
brightness = 0
# ガンマ調整
gamma = 1.0
# 各視点で書き出す
for index, transform in enumerate(transforms):
# 出力ファイル名をつくる
# %04dで4桁連番
#output_file_path=fr'{output_path}Output_{index}_%04d.jpg'
output_file_path=fr'{output_path}{filiname}_%04d_{index}.jpg'
# v360ライブラリのオプション
v360_options = ':'.join([
'input=e', # Equirectangular projection.
'output=rectilinear', # Regular video.
'h_fov=90',
'v_fov=90',
'w=1472',
'h=1472',
# 'interp=gauss',
f'yaw={transform[0]}',
f'pitch={transform[1]}',
f'roll={transform[2]}'
])
# コマンドをつくる
# 順再生
command = f'ffmpeg -i "{input_file_path}" -vf "v360={v360_options}, eq=gamma={gamma}" -qmin 1 -q 1 -r {fps} "{output_file_path}"'
# 逆再生
# command = f'ffmpeg -i "{input_file_path}" -vf "v360={v360_options}, eq=gamma={gamma}, reverse" -qmin 1 -q 1 -r {fps} "{output_file_path}"'
# ffmpegを実行
subprocess.call(command, shell=True)
ファイル名は「v360.py」等わかり易い名前で保存します。.pyというのはPythonファイルの事。
切り出す視点の方向は「#視点リスト(yaw,pitch,roll)」のところで指定しています。
切り出し方によってSfMの結果がどう変わるか検証したかったので、コード内に切り出し方を事前にいくつか用意しておいて適宜コメントアウト部分を変更して検証しました。
通常は動画が再生されている順番そのまま切り出すので問題ないかと思いますが、同じ道を往復して撮影していた場合、復路は逆順で切り出したかったのでコードの最後の部分で「#逆再生にして切り出す場合」も作りました。
その他オリジナルのコードから変更した部分で、ガンマ調整を入れたり、書き出す画像の品質を最高品質になるようにしています。
Pythonファイルが出来たら、Anaconda Promptにてそのファイルを保存した場所に移動します。
私の環境の場合はこんな感じ。
cd D:\OneDrive\Garage\FFmpeg\Python_v360

移動したら以下のコマンドでPythonスクリプトを実行します。
python v360.py

以上!
(書き出した画像をお好みのフォトグラメトリ/3DGS/NeRF等のソフトに放り込んで処理しよう)
Meshroom の aliceVision_utils_split360Images を使う場合Meshroomはフォトグラメトリのソフトですが、全天周画像を展開できるユーティリティツールも配布されています。
まず Meshroomのサイト からMeshroomのソフト本体をダウンロードします。
ダウンロードしたzipを展開すると Meshroom > aliceVision > bin 内に aliceVision_utils_split360Images.exe があるのでこれを利用します。

使えるオプションは以下の通りです。
This program is used to extract multiple images from equirectangular or dualfisheye images or image folder AliceVision split360Images: Required parameters: -i [ --input ] arg Input image file or image folder. -o [ --output ] arg Output keyframes folder for .jpg Optional parameters: -m [ --splitMode ] arg (=equirectangular) Split mode (exif, equirectangular, dualfisheye) --dualFisheyeSplitPreset arg (=center) Dual-Fisheye split type preset (center, top, bottom) --equirectangularNbSplits arg (=2) Equirectangular number of splits --equirectangularSplitResolution arg (=1200) Equirectangular split resolution --equirectangularDemoMode arg (=0) Export a SVG file that simulate the split Log parameters: -v [ --verboseLevel ] arg (=info) verbosity level (fatal, error, warning, info, debug, trace).
具体的には以下のようなコマンドで実行できます。
aliceVision_utils_split360Images.exe -i <全天周画像を入れたフォルダのパス> --equirectangularNbSplits <切り出し枚数> -o <処理後の画像を保存するフォルダのパス>
equirectangularNbSplitsに8を指定すると水平方向で8分割で画像が書き出されます。
以上!
(書き出した画像をお好みのフォトグラメトリ/3DGS/NeRF等のソフトに放り込んで処理する)
前述のFFmpegほど細かい設定はできないようですが、使うまでの工程はこちらの方が簡単。
Premiere ProとGoPro FXを使う場合上記まではコマンドラインですが、GUIで作業したい方はこちらをどうぞ。
Premiere ProをインストールしたらPremiere用のプラグインもそれぞれインストールします。
・GoPro FX Reframe
https://community.gopro.com/s/article/GoPro-FX-Reframe
・Insta360 STUDIO
https://www.insta360.com/jp/download/hot-download
Insta360 Studioのインストール時にPremiere Pro用のプラグインもインストールできます。
360度静止画撮影していた場合は読み込ませるファイル名を連番にしておきます。
連番にしておくことで一つの動画としてPremierに読み込むことができるようになります。

新規プロジェクトを作成する。

プロジェクトにアセットを読み込む。

画像シーケンスにチェックを入れて読み込むと連番静止画を動画として読み込める。

タイムラインへ配置する。

GoPro ReFrameを適応する。

GoPro ReFrameのProjectionを「4K (4096×2160)」に設定する。

シーケンス設定を開く。

GoPro ReFrameのProjectionで選んだものと同じ解像度に設定する。

GoPro Reframeの「Lens Curve」を調整し歪みを補正する。

この例では65にした。
画面を見ながら歪みのなくなる数値に調整する。
「Zoom」の値はデフォルトの100で問題ないと思われるが、SfM処理時にオーバーラップ不足が心配な場合は少し広角にする。

オーバーラップが足りるかどうかは画像を何方向に書き出すかにもよる。
8方向であれば画角90度相当でも問題ないが、4方向のみに書き出す場合はもう少し広角にしてオーバーラップを確保すると安心。
ただし広角にしすぎると画面脇の解像が下がるので注意。↓広角にしすぎた例

設定を終えたら書き出しに進む。

・形式: JPEG
・画質: 100
・フレームレート: 静止画連番を読み込ませていた場合はプロジェクトのフレームレートのままにする(静止画のフレームが全て書き出されるようにする)。動画を読み込ませていた場合は撮影時の移動速度や対象までの距離よって調整する。通常は1または2程度。
OKを押して書き出す。
これで1方向分の書き出しが完了。
続いて残りの方向についても書き出すためGoPro Reframeの設定を変更する。

4方向に書き出したい場合は 0° の他、90° / 180° / 270° に設定したものでそれぞれ書き出す。
上方向の画角が足りない場合はTiltの値を調整したものも加える。
以上!
(書き出した画像をお好みのフォトグラメトリ/3DGS/NeRF等のソフトに放り込んで処理する)
8方向に書き出す場合はPan等の設定を変えて8回書き出さないとならないのが難点。
(そこも一括処理するうまくやり方あるかもしれない?)
最後に作例も紹介。
Insta360 ONE R 1-inchで撮影した360°動画から京都 清水寺の参道をフォトグラメトリ!
メタバースプラットフォーム、VRChatやclusterでワールドを公開しました。
「京都VR」の起動リンクやメイキングについてはこちら。
どのように360°カメラで撮影したのか もメイキングで触れています。
京都をVR化してみた!
スマホでも体験いただけます。清水寺への参道を丸ごと再現。
実際の現地の町並みや和菓子をフォトグラメトリによりデジタルアーカイブ。バーチャル食べ歩き観光できちゃいます〜
VRの起動は続きから。 pic.twitter.com/TmvwTMn6bZ— 龍 lilea (@lileaLab) September 28, 2023
同じデータから大規模、広域なガウシアンスプラッティングも作ってみました。
]]>やりたかったやつ、ついに出来た。
広域3D Gaussian Splatting!
京都清水寺の参道600mを約2万枚の画像から3D復元。
せっかくだから体験可能な形でも用意したいな。#GaussianSplatting pic.twitter.com/WTlMgX9bm1— 龍 lilea (@lileaLab) May 7, 2024
広域な3D Gaussian Splatting × フォトグラメトリ。
それぞれの得意分野を活かしミックスした3D空間を構築。
以下簡単なメイキングです。
出張で浜松へ行ったついでの撮影だったので、機材は最低限。
炎天下しんどかったので10分ごとに休憩を挟みつつ、そして人が来た時も待機しつつで、1時間半ほどで撮影。
撮影枚数は1367枚。
フォトグラメトリ足運びはこんな感じ。


いつも通りループクローズを意識。


カメラの高さは普通に手で構える位置。
アライメント精度を高めたい場合はロッドを使って頭上から微俯瞰で撮影したりもするが、今回は機材も持っていってなかったのと猛暑でそんな気力もなかったので普通に手持ちの高さで撮影。
絞り:11
シャッタースピード:1/200
ISO:100

メッシュ化やテクスチャ生成はいつもどおりの流れ。
フォトグラメトリのメッシュと3DGSのSplatを統合したかったのと、規模が大きくなると3DGSのCOLMAP等では写真位置推定がうまくいかない場合が多いので、RealityCaptureでアライメントした結果を書き出し3DGS処理を行った。
これによってフォトグラメトリと3DGSのそれぞれのデータも同じ座標になるので綺麗に統合出来る。
ワークフローは以下の通り。
現状ではPostshotでは広域、規模の大きなシーンの処理を行うと細部の再現精度が大きく落ちてしまうため。
細部の再現精度を上げるにはSplatの密度も上げる必要があるか現時点ではここのコントロールがうまく行えず、公式3DGSの方で各種パラメーターを最適化して生成した方が良好な結果をなったため。
以下その比較。
・Postshot (ADC)

・Postshot (MCMC)

・公式3DGS

まずそれぞれのデータの状態を確認。

フォトグラメトリは動く物体や形状の細かな物体の生成は得意ではなく、かつ地上からのみ撮影を行っていた場合はこのように樹木周りに品質の低いバリ状のメッシュが生成されてしまう。

こちらは植栽の表現がとても綺麗。
しかし一方で地面の砂利は十分な解像度が得られておらず、3DGS特有の複数の楕円体の重なりで構成されている様子がわかる状態になってしまっている。
※Splatの密度を上げることで再現可能ではあるがデータ容量や処理コスト的にあまり現実的ではない

そのまま合体させるとフォトグラメトリのメッシュに3DGSの暗めのモヤが乗った状態となり、あまり見栄えの良いものにならない。
なので「フォトグラメトリで使いたい部分のみのデータ」と「3DGSで使いたい部分のみのデータ」をそれぞれ用意する。

地面と銅像のみのメッシュにした。

地面と銅像部分のSplatを削除した。
今回はレンダリングにはUnityGaussianSplattingを使用したのでこの機能で不要な部分のSplatを非表示に編集した。

フォトグラメトリと3DGSのそれぞれの利点を活かした、いいとこ取りのデータに出来た。
看板の文字はフォトグラメトリや3DGSで表現するのはデータが重くなってします、現地で別撮りしておいた写真を板ポリにはりつけて表現した。
3DGSだと細部の再現精度が低い状態。

ここにフォトグラメトリのモデルを配置すると、

メッシュとSplatが重なって汚い状態になってしまう。
なのでこの部分のSplatを削除する。
(前項目で解説したのと同様の手順)

そしてこの部分にフォトグラメトリのメッシュモデルを配置。

しかしこれでもまだぼやけていて文字を読むには解像度が足りないので、別撮りしておいた写真を板ポリに貼り付けたものを配置。


これで寄りでも見れるものにできた。
今回はThirdPersonのアセットを入れて歩けるようにしたり、
UnityRecorderで4k動画60fpsレンダリングを行った。
キャラクターが歩き回るためにはコライダーが必要だが、これはフォトグラメトリのメッシュを大幅にリダクションしたものを使用。

以上!
フォトグラメトリも3D Gaussian SplattingもまずはRealityCaptureで写真位置推定するワークフローは共通なので、今後はこのいいとこ取りハイブリッド版を活用したコンテンツも色々作ってみたいな。
]]>浜松城を3Dデジタルアーカイブ!
広域3D Gaussian Splatting × フォトグラメトリ
植栽や空は #GaussianSplatting
地面や銅像、看板等は #Photogrammetryそれぞれの得意分野をミックスした3D空間構築。
作り方はつづきに。 pic.twitter.com/ygSXlQYvLP— 龍 lilea (@lileaLab) August 7, 2024
デジタルツインプラットフォームサービスである「torinome」の開発事例について、清水、上田、丸山がご紹介します。 ぜひ現地でご聴講ください。
【セッション概要】
※事前登録が必要ですので、 登録ページ からお申し込みください。

【Google Cloud Next Tokyo ’24 開催概要】
【イベント概要】
次世代のテクノロジーが集結する、年に一度のビッグイベント Google Cloud Next Tokyo '24 が、日本時間 8 月 1 日(木)〜 2 日(金)の 2 日間にわたり、パシフィコ横浜 ノースにて開催されます。
生成 AI が切り拓く未来、データ分析が導く新たな価値、モダンなアプリケーション開発が生み出す革新的なユーザー体験。さらには、強固なインフラとセキュリティ、多様な働き方を支える生産性向上とコラボレーション。あらゆる業界の発展を加速させる最新のイノベーションが、ここに集結します。 著名なスピーカーによる基調講演、専門分野に特化したブレイクアウトセッション、実際のソリューションを体感できるライブデモ。多岐にわたる充実のプログラムが、あなたのビジネスに新たな視点と発想をもたらします。
Next Tokyo '24 は、刻々と変化するテクノロジーの潮流を掴み、ビジネスの可能性を広げる。そのための最高の機会です。 ぜひ、この特別な 2 日を体験しに来てください。 新たなる未来への扉が、ここから開かれます。
詳細についてはお問い合わせください。 https://hololab.co.jp/#contact
]]>
下記のイベント・展示会への出展を予定しています。 皆様のご参加・来場をお待ちしております!
【展示内容】
京都VR 清水寺参道- 広域3D Gaussian Splattingバージョン
各イベント・展示会の詳細についてはお問い合わせください。
]]>デバイスは Apple Vision Pro に Meta Quest 、 データ関連では PLATEAU 、 デジタルアーカイブ 、OpenAI 。 個別技術として 空間ビデオ や Babylon.js 、 Immersal まで、 事例や技術を豊富にとりそろえています。
ぜひご覧ください!

Hololab Conference 2024 - YouTube
セッション動画やスライドの内容については下記よりお問い合わせください。 https://hololab.co.jp/#contact
ホロラボのこれまでの1年をふりかえり、現在、そしてこの先の方向についてお伝えします。
これまでの手掛けてきた設計内容と Apple Vision Pro の登場による建築設計の可能性について探る
山梨様の講演中にありましたWhitemodel(仮)は、下記メディアより記事が出ていますので、合わせてご覧ください。
施工段階において,CIMの3Dモデルを活用した取組みが活発化している.しかし,現行のAR技術では,3Dモデルの表示が視点位置,移動範囲に制限がある,移動に時間を要してしまうなどの問題がある.これらを解決するため,ドローンによる空撮映像への3Dモデル重畳技術の開発を行った.モデルのAR重畳方式には,ARマーカー,QRコード等を必要としないマーカーレス方式を採用し,ドローンの内部情報(GNSSの位置情報,加速度,角度等)とモデルの位置座標とを適応させることで,自由視点による3Dモデル表示を可能とした。これにより、3Dモデルを現場全景と比較することや移動時間の削減を実現した.
国土交通省が推進する都市デジタルツイン実現プロジェクト PLATEAU のユースケース開発事業として、ホロラボ、日建設計、日建設計総研のJVで実施した「XR技術を活用した市民参加型まちづくり」のプロジェクトをご紹介いたします。
C3-BIMは、建築プロジェクトの設計情報(BIMデータ)をベースに、どこに置いてあるかわからない文書や資料の情報を集約しAIによる解析を行い、知りたい情報を横断的に検索することができるプロダクトです。
ホロラボカンファレンス2023では「BIMから3次元モデルを消してみたら、意外に便利でした」というタイトルで、R2-BIMというプロダクトをご紹介させていただきました。C3-BIMはこのR2-BIMを進化させたプロダクトです。
本セッションでは、C3-BIMの取り組みやその背景についてご紹介します。 セッションをきっかけに、BIMを活用したデジタルトランスフォーメーションに挑まれている方と意見交換させてください。
Apple Vision Pro の全体観と可能性について、Apple Vision Proのハードウェアの概要、Apple のハードウェアエコシステム内での立ち位置をお話しします。
これらを踏まえて、Apple Vision Pro の新しい可能性についてお伝えします。
Meta Quest 3やApple Vision Proの登場でより実用的な技術となったビデオパススルーのデジタルミュージアムとしての活用方法を実現に向けた工夫ポイントや具体的な事例を交えながらご紹介いたします。
本セッションは、建設業の課題である技術継承をサポートするために、文書業務に着目し、経験者のスキルをプロンプトとして実行するChatGPTによって実現できるという仮説をもとに、アプリケーションのデモを通じてその紹介と可能性についてお話します。
昨年OpenAIがChatGPTやGPT-4を発表してから、大規模言語モデルを始めとする生成AIに対して日々の業務における活用の期待が高まっています。日常の業務の多くの場面で自然言語が使われています。建設業においても同様で、たとえば要求水準書を読むことで求められる建物の要求を抽出したり、建築基準法を読み込み満たさなければならない法的基準を把握するなどといった、言語を用いた業務が存在します。
一方で、2024年問題が到来し、いかにしてこれまで熟練の技術者たちがやってきたことを継承していくかが喫緊の課題となっています。継承すべき技術の中には、手作業など身体に基づく技術もありますが、業務上の文書を処理する技術といったものも存在します。ですので、建築業界においても実用化の期待が高まっており、いくつか事例が出始めています。その多くはOpenAIが提供するChatGPTと同様のチャット型のインタフェースを提供しています。ですが、チャットの投稿画面に何を質問すれば良いのかわからず、質問する機会を目の前にしながらも質問を考えるスキルの有無で技術の差が発生しています。
そこで我々は、経験者のスキルをあらかじめ言語化し、それを共有して利用可能にすることで、文書を用いる業務をChatGPTによって誰でも経験者のような成果を得られるのではないかと考えています。
このセッションでは、ホロラボが開発したデジタルツイン基盤システムである「torinome」に焦点を当てます。「torinome」は、Project PLATEAUによって整備され提供される3D都市モデルを含む、様々なGISデータ、画像、動画、3Dモデルを位置情報と関連付けて、地理空間情報を視覚化することを可能にします。このセッションでは、「torinome」が可能にすること、その仕組み、どのように活用されているか、そして将来の展望について詳しく紹介します。
国登録有形文化財「沖本家住宅」のフォトグラメトリによる3Dデータ化から見るデジタル文化財アーカイブの舞台裏に待っています。
近年、建設業界では3DCAD(BIM/CIM)とゲームエンジン等によるレンダリング技術の浸透により、3Dによる設計や完成予想の提供が当たり前になると同時に、計画案に樹木の配植(はいしょく)までを取り入れる、3D樹木モデルの利用と必要性が高まっていくと考えられる。しかしながら、現行の3D樹木モデル(樹木アセット)には、日本固有の樹種が少ないことや、樹形(樹種に応じた樹木の形)の信憑性等、多くの問題が存在する。これら問題に対し、ホロラボでは、地上型3Dレーザスキャナによる、実測に則った日本固有および風土に適したの3D樹木モデルの構築プロセスを提案する共に、建設業界から3DCGデザイン(特にゲーム業界)に向けた需要と展望について考える。
富山県滑川市にある、ほたるいかミュージアムでは、長年の課題であった実物のホタルイカが展示できない期間を、VR技術を用いて解決しました。VR導入により、訪問者はホタルイカに"変身"して生態を体験できるようになり、この新しい展示方法は、県外からの訪問者を引き寄せ、賞を受賞するなど、ミュージアムに新たな魅力をもたらしました。 この展示で、UnrealEngineのどの技術を利用したか。歩行デバイスによるVR酔い軽減、ハンドトラッキングによる直感的操作、展示のコツなどを紹介します。 また、自身の開発に対する思い、それがUnmageというHololabのUnreal Engine チームでどう活かせているか。チームの取り組みもお伝えします。
Apple Vision Proで3次元で動画再生ができる空間ビデオ(Apple HEVC Stereo Video)の特徴や作成方法について、ホロラボで調査・開発した内容を紹介します
Web 3DエンジンであるBabylon.jsの新バージョンであるBabylon.js 7が3月末にリリースされたので、このタイミングでBabylon.jsの概要と魅力、そして最新バージョンの注目機能についてご紹介します。
昨年のLTでも行ったようなVPSサービスの更新情報紹介や、最近じわじわと広がりつつあるARフィルターのご紹介、そして時間が許せば、ホロカンお菓子大作戦の紹介と技術解説ができればと思っています。
ホロラボがオープンソースとして開発を進めている「Project Spirare」を使ったノーコード AR コンテンツ開発の手法を紹介します。 「Project Spirare」では「Spirare Editor」という AR コンテンツ編集アプリと「Spirare Browser」という AR コンテンツ表示アプリを組み合わせることにより、誰でも簡単に AR コンテンツを作成し各種デバイスで表示することができます。 本セッションではコンテンツ作成から表示までの一連の流れと技術的な詳細について、デモを交えてご紹介します。
3/4(月)に新しいオフィスへ移転したホロラボですが、移転するまでにあったホロラボならではのストーリーを解説。 物件を決めた理由からレイアウト作成、BIM、AR、3D都市モデルなどデータをどう使うかたかなど含めて時系列で紹介します!
こちらのURLで無料で頒布していますので、
よろしければご一読ください。

目次
プレゼン中に余分なウィンドウを開かないように監視するアプリを作ってみた
WindowsのAPIを使ってデスクトップ上のウィンドウを監視してインシデント防止!?
はじめての VR ゲーム開発
Meta QuestでのVRゲーム開発のわかりやすいチュートリアル 最新のQuest SDKの使い方も解説します
Unity でも使える! C#の Switch 式
最近のUnityでも使えるC#の新し目な機能を説明します
Unity でのネットワーク通信を手軽に実現する:Mirror の活用
UnityでMirrorを使ってマルチプレイを実現する方法を解説します
点群の Draco 圧縮
Googleの圧縮アルゴリズム「Draco」が点群を超圧縮する仕組みを解説
よろしくお願いします。
]]>【展示内容】

各イベント・展示会の詳細についてはお問い合わせください。
]]>
公式サイトはこちら。
コマンドラインで実行する公式の3D Gaussian Splattingの環境構築方法もこちらで解説していますが、CUIは慣れていないとなかなか使いこなすのも大変。この点postshotはマウス操作で直感的に利用できます。
直感的に使えるので使用方法は詳しい説明がいらないレベルではありますが、応用的な使い方を含めて以下にまとめてみました。
後半ではRealityCaptureの併用方法(アライメント結果を読み込む)についても紹介しています。
公式サイトからDLしてインストールする。

起動すると以下のような画面になるので、表示されている通り画像をドロップ&ドロップする。

読み込むとダイアログが表示されます。

デフォルトだと「Image Selection」が「Best Images」になっていますが、使用する写真が限定されるので、すべての写真を利用したい場合は「Use All Images」を選んでおきます。
「Start Trainning」は「Import」ボタンを押すとすぐ処理が開始される設定です。写真を読み込んでから設定をつめて、それからトレーニングを実行したい場合はこのチェックは外しておきます。
右下の「Import」を押すと写真が読み込まれます。
読み込まれたら、左上の「Start Trainning」を押すと処理が開始されます。

しばらく待つとリアルタイムに処理中の様子がビューポート上に表示されます。
以上、最低限の使い方でした。
(その他便利な使い方等は今後追記予定)
各種パラメーターの詳細ついては公式マニュアルに記載があります。
2024/10/12のアップデートでUnreal Engineに対応したようです!
3D Gaussian SplattingをUnreal Engineで利用する手段がまた1つ増えた。
使い方は簡単だった。


以上。
大規模なシーンや複雑なシーンを処理する場合、postshotではうまくアライメント(写真位置推定)ができない場合があります。
(現在postshotにはコントロールポイントを使用したり、レーザースキャンデータを併用する機能はありません)
しかしこうした複雑なシーンを事前にRealityCaptureでアライメントを行っておくことでこのデータをpostshotに読み込ませて利用することができます。
この方法がまだ公式マニュアルには記載がないので手順をまとめました。
※追記 本日(2024/8/22)公式マニュアルにも記載されました。該当ページはこちら
RealityCaptureの使い方については「フォトグラメトリ手順書」にまとめているので参考にしてみてください。
Alignment > Export > Registration > Internal/Extenal camera paramerters から書き出す。

設定はデフォルトのままでOK。

Alignment > Export > Point Cloud > Sparse point cloud as Polygon File Format から書き出す。

Export asciiをFalseにする。


写真は歪み補正前のオリジナルの写真で良い。
この設定によりカメラポーズ(写真位置)については読み込んだcsvのデータを用いる事になるので、postshot上での写真位置推定はスキップされます。

読み込むと既にカメラと点群がビューポート上にある状態になる。
RealityCapture上と同じ状態で読み込めた。

あとは通常通り、お好みで設定を調整してトレーニングを開始する。
以下がこのワークフローでRealityCaptureを併用した大規模、広域の3D Gaussian Splattingの作例です。
(postshotのみでなく公式3DGSも併用してる例ではありますが)
600mの道程約2万枚の画像から生成しました。
]]>やりたかったやつ、ついに出来た。
広域3D Gaussian Splatting!
京都清水寺の参道600mを約2万枚の画像から3D復元。
せっかくだから体験可能な形でも用意したいな。#GaussianSplatting pic.twitter.com/WTlMgX9bm1— 龍 lilea (@lileaLab) May 7, 2024

COLMAPでは難しい複雑であったり規模の大きなシーンのアライメントをRealityCaptureやMetashapeで行い、そのデータを活用するといったものです。
この記事は手段の紹介なので手順の紹介ではないです。
(私の知識不足でやり方がわからんのもある
(手順も追々追記するか別記事で書くかも
COLMAPデータへの変換は1年前くらいから探り始めてたのだけど、ここ最近になって使いやすいツールがいくつか出てきて。ありがたや。
以下A~Fまで手法を上げていますが、現状では
「E」のRealityCapture-to-Postshot
が安定で便利な印象。
公式のフォーラムで機能リクエストされている。
・https://forums.unrealengine.com/t/support-colmap-export/1277698
投票せよ!そして気長に待つべし。
COLMAPのこのIssue によるとKaptureというものを使うとBundlerのoutファイル経由で変換できるらしい。
” In the meantime, one can probably use Naver/Kapture with an intermediate bundle.out file to produce colmap alignement files from RC. “
・https://github.com/naver/kapture
・https://europe.naverlabs.com/research/3d-vision/kapture/
後述の「RealityCapture-to-Postshot」はこのKaptureが使われている。
Jonathan Chemla氏にコマンド例教えていただいた。
・https://x.com/jo_chemla/status/1786488108747309472
RealityCaptureから書き出したcsvからColmapのimages.txtとcamera.txtを作成する
・COLMAP – images.txt
・nakano_muramotoさんの解説記事 – RealityCaptureのregistrationデータを流用する検討
・https://github.com/stuarta0/blender-photogrammetry
・NegativeMindさんの解説記事 – BlenderでPhotogrammetryできるアドオン
RealityCaptureから書きだしたBundlerを読み込む事ができ、そしてCOLMAPに書き出すことも出来る。
(Metashapeから書き出したBundlerでもいけるかは未確認だが、使えるはず?)
・https://github.com/Maxiviper117/RealityCapture-to-Postshot
RealityCaptureから書きだしたBundlerをCOLMAPに変換出来る。
(Metashapeから書き出したBundlerでもいけるかは未確認)
・https://github.com/agisoft-llc/metashape-scripts/blob/master/src/export_for_gaussian_splatting.py
Metashapeから直接COLMAP形式に変換出来る。
スクリプトで実行するのでPro版が必要。
※追記 先日(2024/9/9)のアップデートでv2.1.3以降はStandardライセンスでもCOLMAP形式に書き出せるようになりました。
COLMAPを経由せずに直接3D Gaussian SplattingやNeRF用のデータに変換できるものもあります。用途によってはこちらの方が簡単で良さそう。
COLMAPを経由せずにRealityCaptureから直接3D Gaussian Splattingへ持っていきたい場合は「Postshot」が対応しているので便利。
・https://www.jawset.com
具体的な使い方は こちら の記事にまとめました。
Metashapeから直接NeRF(instang-ngp)のtransform.jsonに変換したい場合は「agi2nerf」が有用。
・https://github.com/EnricoAhlers/agi2nerf
RealityCaptureから直接NeRF(instang-ngp)のtransform.jsonに変換したい場合は「rc2nerf」が便利。
・https://github.com/joreeves/rc2nerf
このワークフローを利用して京都の清水寺参道、600mの道程を約2万枚の画像から生成しました。
やりたかったやつ、ついに出来た。
広域3D Gaussian Splatting!
京都清水寺の参道600mを約2万枚の画像から3D復元。
せっかくだから体験可能な形でも用意したいな。#GaussianSplatting pic.twitter.com/WTlMgX9bm1— 龍 lilea (@lileaLab) May 7, 2024

「HoloLab Conference」はホロラボとともに新しい技術をいち早く使いこなす企業様と、それを支えるエンジニアの経験を広く共有し繋がり、より多くの人たちがこれらの技術を体験できるようにすることを目的とした「場」です。
各企業様とホロラボが取り組みを進めてきたMixed Realityの実⽤に向けた取り組みや、BIM/3D CAD/3D CG/点群のような3Dデータ活用に向けた取り組み、GPS/VPS(Visual Positioning System)/PLATEAUのような空間情報技術活⽤に向けた取り組みの事例共有の場として「HoloLab Conference 2024」を開催します。

オンライン一般参加をご希望される方は、下記ページよりお申込みください。 https://connpass.com/event/311388
オンライン一般参加では、Zoomでのリアルタイムセッション視聴/質疑応答が可能です。
※当日のセッション視聴方法についてはお申し込みいただいた方に別途ご案内させていただきます。
実用に向けた取り組みをされている各社様とホロラボ合同の事例セッションと、基盤技術や技術調査などについての技術セッションの2種類のセッションを実施します。セッションは2タイムテーブルの進行で合計で最大15セッション程度を予定しています。
また、後日セッションをアーカイブ動画として公開する予定ですが、映像や音声へ編集が入る場合や一部セッションについては公開無しになる場合があります。ぜひリアルタイムでご参加ください。
株式会社ホロラボ イベント窓口:event@hololab.co.jp
]]>
弊社依頼時のクオリティサンプルとしてお手元でぜひご確認ください!
本手法によって作成される3D樹木モデルは実測に基づいており、かつ、樹木の点群データから3Dモデル化を行うためのアルゴリズムの使用により、実物に近い樹形の再現性を可能としております。
また、季節ごとの差分モデルによって、同じ樹木でも季節による違いを視覚的に確認することができます。
今回の樹木モデルをはじめ、空間スキャンやフォトグラメトリ・デジタルアーカイブ、デジタル空間&体験デザインなどの空間情報技術に特化したメンバーが在籍しています。
撮影からデータ整備、コンテンツ制作までを一貫して担当することができますので、ご興味ある方は下記よりお問い合わせください。
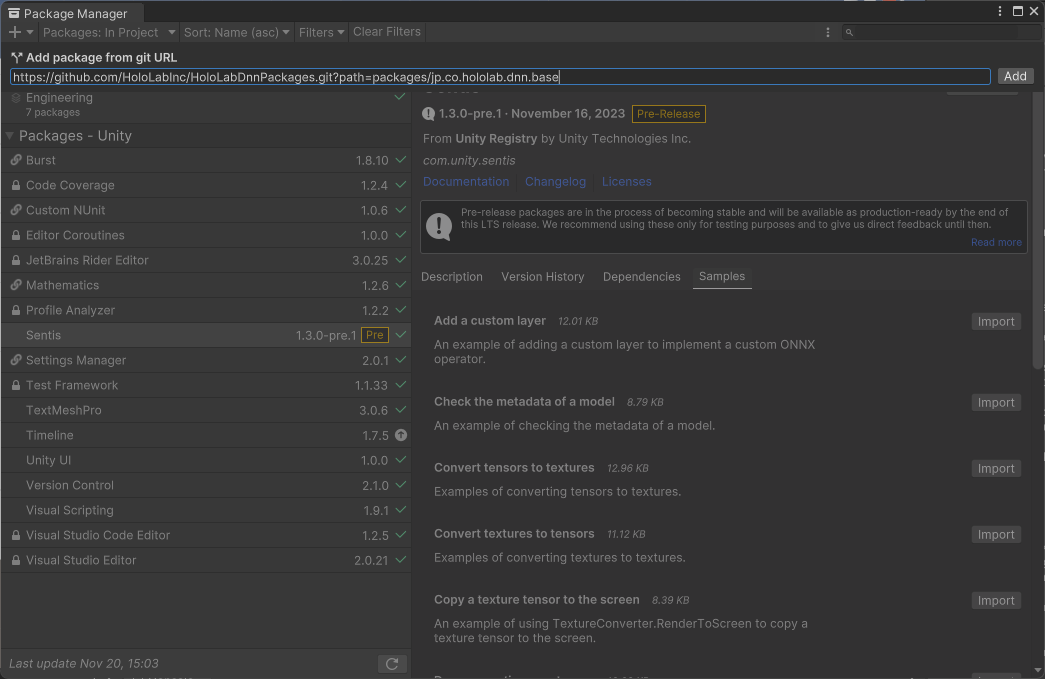
]]>このたび、Unityで手軽に使える画像認識パッケージのHoloLab DNN Packagesを公開しましたのでご紹介いたします。
HoloLab DNN Packagesは以下のリポジトリで公開されています。

HoloLab DNN PackagesはUnity Sentisをベースにディープラーニングによる画像認識を実装したパッケージ集です。
本パッケージには以下の特徴があります。


HoloLab DNN Packagesをセットアップする方法を紹介します。
HoloLab DNN Packagesはベースとなる1つのパッケージと画像認識のタスクが実装されたいくつかのパッケージで構成されています。
それぞれのタスクのパッケージはベースのパッケージに依存するので、ベースのパッケージとセットでインポートしてください。
パッケージのURLはそれぞれのパッケージのREADMEを参照してください。

HoloLab DNN Packagesのそれぞれのタスクのパッケージには直ぐに実行できる簡単なサンプルが含まれています。
ここでは、サンプルの実行方法を簡単に紹介します。

UnityのProjectウィンドウのSamplesフォルダにサンプルがインポートされます。
Scenesフォルダに含まれているシーンに切り替え、Unityの[Play]ボタンを押して実行してください。
サンプルは画像とボタンが1つずつ配置されたシンプルな画面になっています。
画像の下にある[Inference]ボタンを押すと推論が実行されて結果が表示されます。
(初期化があるので初回の実行のみ少し時間が掛かる可能性があります。)

基本的に以下の流れで画像認識を実装できるようになっています。
名前空間を参照する
using Unity.Sentis;
using HoloLab.DNN.Classification;
クラスのインスタンスを作成する
[SerializeField] private ModelAsset weights;
var model = new ClassificationModel(weights);
利用する学習済みモデルに合わせてパラメータを設定する
model.SetApplySoftmax(true);
メソッドに画像や閾値を渡して実行する
(var class_id, var score) = model.Classify(texture);
このように、HoloLab DNN Packagesを利用することで、ユーザーはわずか数行の記述で目的の画像認識を実装することができます。
スクリプトからの詳しい利用方法は、それぞれのサンプルのソースコードを参照してください。
Unityで手軽に使える画像認識パッケージのHoloLab DNN Packagesを紹介しました。
HoloLab DNN Packagesを利用してアプリに画像認識を組み込んでみてください。
CEOの中村です。
そろそろ Apple Vision Pro の米国発売から一週間経ちます。ホロラボもハワイにて Apple Vision Pro を無事に購入できました。


バックアップ及び空間共有機能のテストを含めてとりあえず2台。

ハワイ Ala MoanaのApple Storeにて受け取り。予定が16:30だったのですが、店員さんと会話して10:00に前倒し。
受け取りして同じくハワイに購入に来ていたジャーナリストの西田さんのところにお邪魔して場所を借りつつ開封の儀。
粛々とセットアップを行なっていました。
色々アンボックスしてる人々 pic.twitter.com/tC700dCgXT
— Munechika Nishida (@mnishi41) 2024年2月3日
単体のハードウェアとしての出来上がりは流石のApple品質。というところで、体験や操作をしてて「あれ?」というような引っかかりもなく、とても良いものと感じています。
ディスプレイ性能もよくコンテンツはドットも見ない高品質に表示され、ビデオシースルーも歪みやズレも少なくApple Vision Proを装着したまま室内の移動やスマートフォンの操作などができるほどです。
操作についても目で選択して、指のタップで選択。という他のデバイスに近い操作体系で特に迷うこともなく。
初見の方の場合は「目の操作」、「指でタップ」は慣れるまで難しいので、少し練習が必要です。ここはHoloLens 2などと同じですね。
アプリは現状では米国で公開されているアプリのみになりますが、 Apple Vision Pro 専用アプリのみならず、iOS/iPad OSのアプリとして公開されているものも(パブリッシャーの指定があれば)インストールしての利用が可能です。
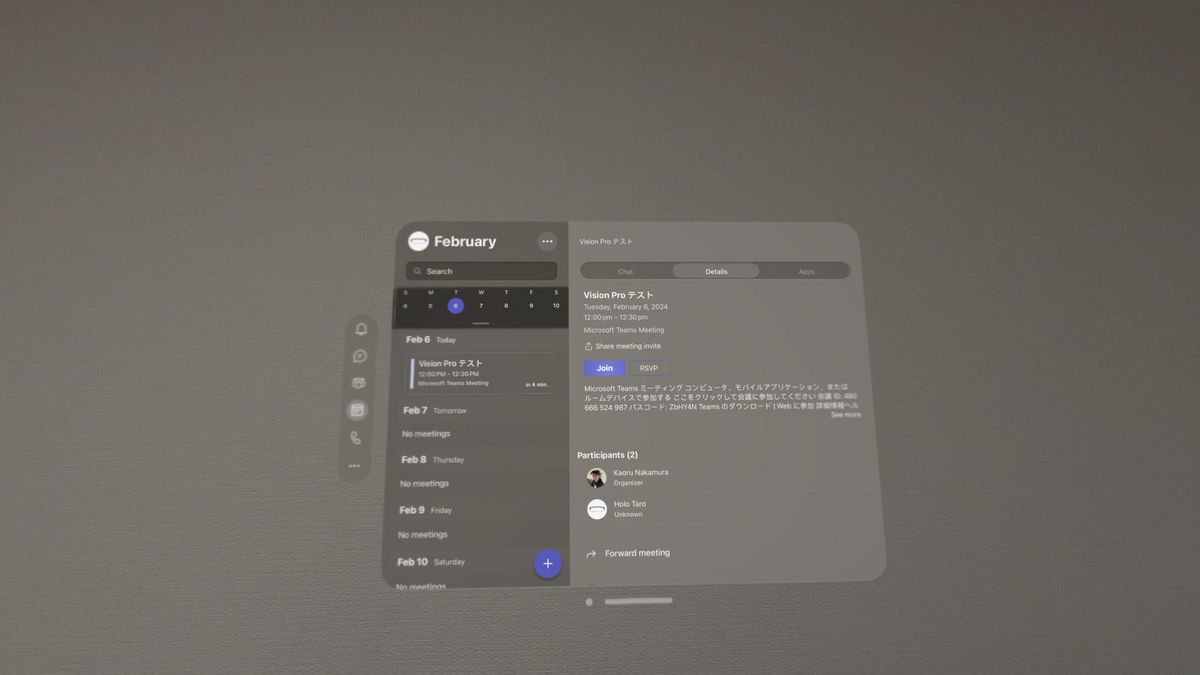
左(最初)の画像が Apple Vision Pro専用アプリ、右(次)が iOS/iPad OS 互換アプリになります。


XやCatGPTなどの2Dで十分なアプリは、今までのアプリをそのまま利用可能になり、最初のアプリ数の壁を超えています。
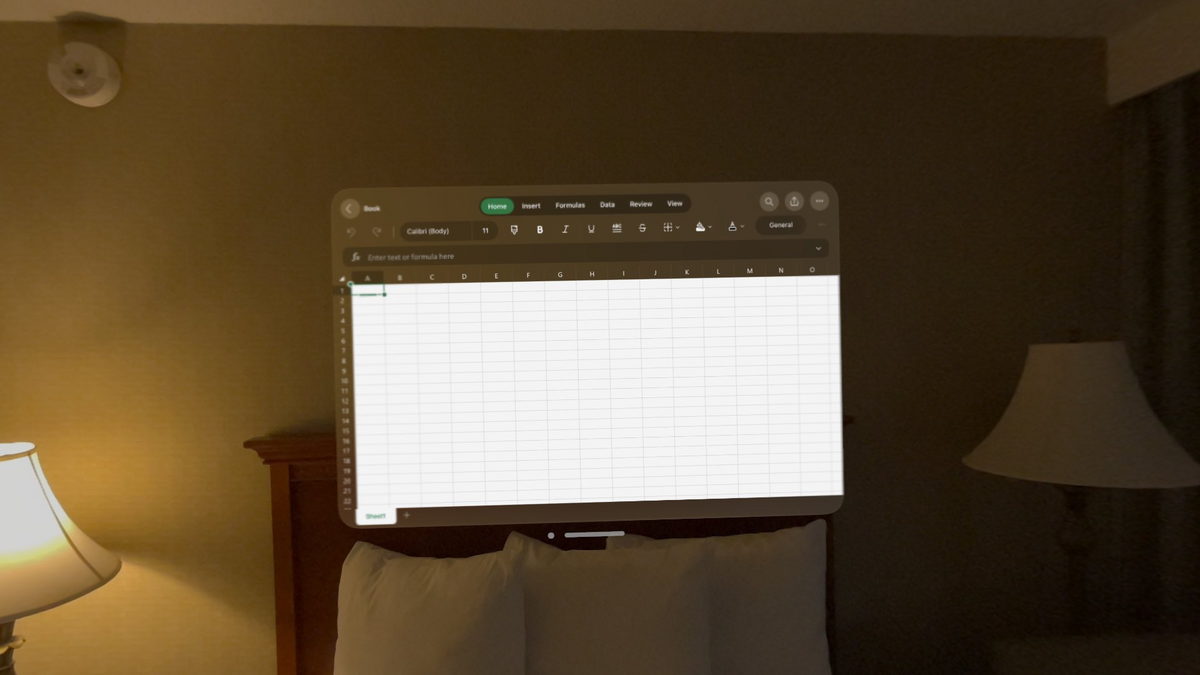
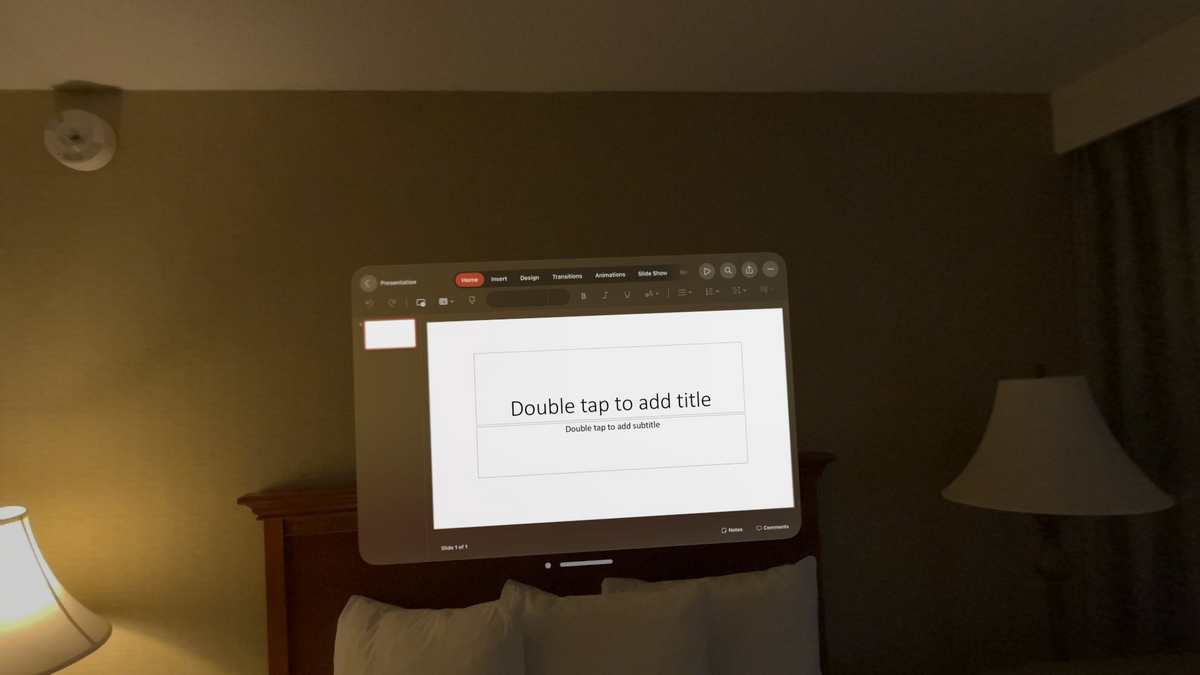
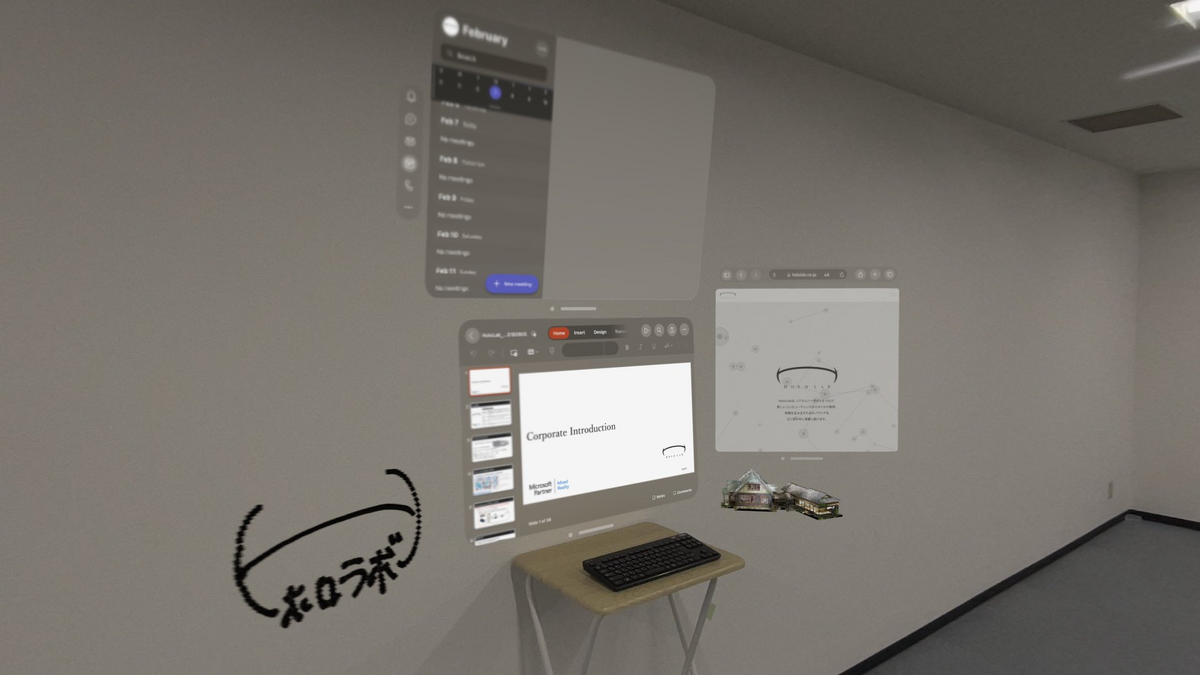
仕事の環境として。という意味では、Microsoft TeamsやPower Point、 Excel、WordといったOfficeアプリはApple Vision Proのネイティブアプリとして公開されています。Outlook、OneNoteはiOS/iPad OS互換アプリとしてストアからインストールできます。
Bluetoothキーボードの接続もできるので、Apple Vision Proを装着しながら外部キーボードと合わせて業務が可能ですね。
Apple Vision Pro には外側にもディスプレイが付いており、自分の目の周辺を表示できます。

「ペルソナ」という機能でこのようにApple Vision Pro を持って自分で自分の顔をスキャンします。
賛否それぞれの感想を見ますが、個人的にはEyeSight は好きです。
Meta Quest 3など、今までのビデオシースルーでの経験で、HMD(Head Mounted Display)を装着している方は相手の表情が見えるけど、装着してない方は相手(装着している方)の表情が見えない関係だったので、力技にせよ同じような見え方になるのはより現実のコミュニケーションに近づくと考えています。
Apple Vision Proはハードウェア単体でも高品質なデバイスですが、Appleの製品ということでAppleのハードウェア、ソフトウェアの中に入ってこそ本領発揮だと考えています。
最初にApple Vision Proで体験している光景を共有したり、他の方が体験している様子を見たい時には、Apple Vision Proがら見えている様子をどこかに表示させたくなります。
いきなりここでAppleのいままでの流れと同じことができ、AirPlayにてApple TVでの表示が可能です。iOS/iPad OS 17以降ではiPhone/iPadをAirPlayレシーバーとして設定する機能もありますので、Apple TVがない場合でも、iPhone/iPadで表示が可能です。
Apple Vision Proの画面をiPadに転送している様子(Apple Vision Proで見ている光景(iPadやアプリ)がiPad上にも表示されている)

また、いままでのデバイスで意外と手間がかかっていたファイルの共有についてはAirDropでの転送が可能です。
AirDropはApple Vision Pro, iPhone, iPad, Mac間でそれぞれファイルの転送が可能で、これを利用すると下記のようにiPhoneでスキャンしたデータをすぐさまApple Vision Proに転送して利用する。ということが可能になります。
iPhoneLiDARでスキャンした モデルをそのままVision Proに。
— 中村 薫 (@kaorun55) 2024年2月4日
AirDropですぐに転送できるのがでがるで良い。
この動画はVision Proで撮ったものをAirDropでiPhoneに送ってアップしてる。#AppleVisionPro pic.twitter.com/M7FGMQjGAp
ここからの派生として、Appleデバイス間で共通の「USDZ」という3Dを表現するファイル形式があります。
元々映画制作のPixerが定義したUSDというフォーマットで、Apple製品ではこの派生フォーマットであるUSDZをOSで扱うことができます。
iOS/iPad OSではAR Quick LookとしてモデルビューアーやARにて表示できます。
Apple VIsion ProでももちろんUSDZがサポートされており、先ほどのようにiPhoneのLiDARで3Dスキャンした3DモデルをUSDZでAirDropでApple Vision Proに転送することにより、すぐさま実寸でモデルの確認ができます。
最初にも書いた通り、ディスプレイはとてもキレイですので、高品質な3Dモデルが高品質なまま閲覧体験が可能です。
先日公開した沖本家住宅も綺麗に出せる。
— 中村 薫 (@kaorun55) 2024年2月4日
#AppleVisionPro pic.twitter.com/uA1HxXxT79
AirPods Proとの連携も強力で、AirPods Proでは外音を遮断できます。飛行機の中でも飛行音が聞こえなくなるほどです。
Apple Vision Proは視覚を遮断できるデバイスです。カメラから映像を中のディスプレイに表示するビデオシースルーという方式のため、ディスプレイの映像をカメラではなくコンピューターで作成した空間にすることで、視覚の外界との接点を切ることができます。
この2つを組み合わせることで、視覚と聴覚を外界から切り離し、体験に没入することが可能になります。
この体験には「Mindfulness」というアプリがおすすめです。
Apple Vision Proで視覚と聴覚のノイズキャンセリングだとMindfulnessアプリがオススメ。
— 中村 薫 (@kaorun55) 2024年2月10日
最初は外が見えていて途中から真っ暗になって視界が遮断される。
AirPods Proで聴覚も遮断すると、ほぼ外界から断絶した環境にできる。 pic.twitter.com/8iXLWqs7cQ
このほかにもMacをApple Vision Proに接続してディスプレイにできる「Mac Virtual Display」により、MacをApple Vision Pro内で使うことができます。
Apple Vision Pro単体では対応していないアプリや作業などはMacを併用することでApple Vision Pro内で完結することができます。
このようにApple Vision Proはハードウェア単体でも、Appleエコシステムの中でもいままでとは違った使い方、体験ができるデバイスと考えています。
今後日本で発売された後はそれぞれの環境に合わせた使い方が可能です。
Apple製品を多数お持ちの方はAppleハードウェアエコシステムの恩恵を受けながら。
Apple製品をあまりお持ちでない方はApple Vision Proから。
Apple Vision Proからの場合は、キーボード、Magic TrackPad、AirPods Proを合わせて持っておくと、Apple VIsion Proで完結する環境ができて良いでしょう。
ホロラボでももちろんApple Vision Proのアプリ開発に取り組みます。
最初のアプリとして「Spatial Paint」という空間ペイントのアプリケーションを米国App Storeにて公開しました。

このアプリは文字通り空間にお絵かきができるアプリで、VRアーティストのせきぐちあいみさんとコラボレーションを進めていきます。
もちろんApple VIsion Proをお持ちの全ての方に使っていただけますので、ぜひインストールしてください。
Spatial painting with #AppleVisionPro https://t.co/QZ3t944ntM pic.twitter.com/L0gLuKyzAM
— Aimi Sekiguchi🌐ايمي (@sekiguchiaimi) 2024年2月8日
「Spatial Paint」はいままでのホロラボの取り組みと異なるとようにも見えますが、HoloLensでペイントアプリ作ってせきぐちさんとコラボレーションしてるメンバーがいて、これをApple Vision Proに合わせてアプリリリースをする。という経緯です。
Apple Vision Pro自体もコンシューマーに向いており、これを機に空間の中でコンピューター扱うというユーザーが増えると考えています。
その中で空間で「絵を描く」というシンプルですが、わかりやすいテーマでのアプリ。としています。
また、Apple Vision Proはデバイス単体ではなく、コミュニケーションを重視していると考えていますので、描いたモデルはUSDZで出力し、共有することが可能です。
これによって、ユーザーは自分が描いたモデルを共有し、お互いに楽しむことができます。もちろんiOS/iPad OSの方もそこに加われます。
描いたものを空間に置いていく pic.twitter.com/xCDmM5WWQA
— 中村 薫 (@kaorun55) 2024年2月4日
いままでのサービスの延長もあります。
ホロラボにて提供しているBIM/CAD向けサービスであるmixpaceのApple Vision Pro版を日本発売に向けて準備を進めています。
Apple Vision Proでの高品質なディスプレイにより、いままでとは違った体験になりますので、登場をお待ちください。

空間コンピューティングの自分なりの解釈として、空間とコンピューターが日常世界で共存する世界、Apple Vision Proを日常から使い続ける世界に変わっていくと、いままでの生活スタイルも少しずつ変わっていくのかなと考えています。
技適特例申請も提出したので、この範囲内で試していきます。
基本は公式マニュアルの通りではありますが、ところどころ躓くところもあったので備忘録としてスクショ多めで。
Unityで制作できるアプリのタイプの名称について一旦整理。
要件はこちら。
まずはXcode 15.2を入れる。

visionOSにチェック入れる。
Unityのバージョンは2022.3.18f1以降。
2023は現時点ではLTSではないので2022を使う。
テンプレートは2022.3.18f1なので同じバージョンをインストールする。
Appleシリコン版の方をインストールする。

モジュールはvisonOSとiOSの両方を入れる。

パススルーを用いたMixed Reality(PolySpatial MR)のコンテンツを作成する場合の手順です。
VR(Fully Immersive)のコンテンツの場合については次項。
このマニュアルに従って作成する。
まずUnity2022.3.18f1で新規プロジェクト作成。
ビルトインシェーダーでも動作はするがMRのサンプルコンテンツはURPで作られているので特別な理由がなければURPで作るのが良さそう

Project SettingsでXR Plugin Managementをインストーする。

Apple visionOSを有効にする。
Yes

Unityが再起動される。
XR Plug-in ManagementのApple visionOSを開きMixed Realityを選択する。

Yes

このMixed Realityを選択したことで以下の3つのパッケージがインストールされた。
com.unity.polyspatial
com.unity.polyspatial.visionos
com.unity.polyspatial.xr
Usage Descriptionに適当な文章を記入する。

例)
Use hands tracking
Use world sensing
Project ValidationでFixしておく。

プラットフォームをvisionOSに切り替える。

環境構築は以上だが、サンプルシーンを使う場合は Packages > PolyStatial > Sample からインポートする。

インポートしたシーンはこちらにある。

各サンプルシーンの概要はこちら。
プロジェクトの作成は以上。
続いて、実機ビルドせずに実行結果をUnityエディタ上で確認できるvisionOSシミュレーター「Play to Device」を設定しておくと便利です。こちらについては記事の後半に記しました。
Fully Immersiveのプロジェクト。
つまりMRは使用しない、完全没入のVRのプロジェクトを作成する場合。
こちらのマニュアルに従って進める。
XR Plug-in ManagementのApple visionOSを開くところまでは前項目のMRのときと同様の手順。
Fully Immersiveの場合はここでVirtual Realityの方を選択する。
前項目はUnityプロジェクトを1から構築する場合だったが、ここではテンプレートを使用する場合について。
テンプレートのzipを解答しUnityで開く。



プラットフォームをvisionOSに切り替える。

(テンプレートを使った場合はXR Plug-in ManagementのApple visionOSのチェックは既に入っている
(必要なパッケージも既に入っている
メニュー > Tutorial > Show Tutorials を選択。

表示されたウィンドウ内にある各ボタンをクリックすると、VRコンテンツを制作するためのチュートリアルが開始される。

visionOSのシミュレーターの設定。
こちらのマニュアルを参考に進める。
ディスカッションページはこちら。
PlayToDeviceHost-1.0.3.zipをダウンロードする。

zipを解凍する。

Xcodeを起動しSimulatorを起動する。(またはComannd+SpaceからSimulatorを実行)

ここでiPhoneのシミュレーターが立ち上がってしまった場合は、アプリ上のメニューからApple Vision Proを選択する。

ダウンロードしたPlayToDeviceHost.appをシミュレーター画面内にドラッグ&ドロップする。

シミュレーター内にインストールされる。

Play To Deviceウィンドウを開く。

Enabledにする。

visionOSのシミュレーターでPlay To Device Hostアプリを起動する。

待機状態になる。

この状態でUnityでPlayするとシミュレーター側に表示される。

以上。
通常通りのビルドでOKだが、私の環境では以下のエラーが出てしまった。
Building Library/Bee/artifacts/iOS/AsyncPluginsFromLinker failed with output:
UnityEditor.Build.BuildFailedException: Burst compiler (1.8.12) failed running
stdout:
Internal burstc error:
Burst.Compiler.IL.Aot.AotLinkerException: Failed to determine xcode installation path - "xcode-select -p" is XCode installed? xcrun: error: invalid active developer path (/Library/Developer/CommandLineTools), missing xcrun at: /Library/Developer/CommandLineTools/usr/bin/xcrun
こちらの記事を参考に対応しました。
ターミナルに以下のコマンドを実行です。
sudo xcode-select --switch /Applications/Xcode.app
これでエラーなくビルドできるようになりました。
以上!
]]>このたび、ホロラボの有志で技術同人誌「ホロらぼん Vol.2」を制作し、技術書典15で頒布しました。
イベントは終わりましたが、引き続きこちらのURLで無料で頒布していますので、 よろしければご一読ください。 メンバーそれぞれが今興味がある技術について書いたごった煮な技術同人誌となっています。
目次
M5 AtomS3でp-duckを愛でる M5 AtomS3という小さなデバイスでp-duckをSlackにスタンプするデバイスを作りました。
みんなで街並みをスキャンする 街並みスキャンのスキャンソンについて。 イベント紹介やスキャンのコツなどを解説。
C#でBSONデータを扱ってみよう C#でBSONシリアライズ形式を使うときのTipsなど。
よろしくお願いします。
]]>UE記事一発目、UEでのMVVMについて触れていこうかと思います。 過去、お仕事でUnityにおいてC#でMVPパターンにて設計を行ったことがあるのですが、特に継続性のあるプロジェクトや複数デバイス/プラットフォームでの実装などを見越している場合では、かなりの効果を発揮すると実感しています。 今回、MVPではなくMVVMパターンに焦点を当てていきますが、UEでの設計の勉強の一つとして書いていきます。
今回、alweiさんのMVVMの記事を前提とします。 - UE5 UMG ViewModelを利用してBPオンリーのMVVMをしてみる https://unrealengine.hatenablog.com/entry/2023/09/28/233801
まず記事を書こうと思った動機としては、View-ViewModel側やModel側にバリエーションを持たせたとき、実際にどう作っていくのがよいかと疑問に思ったためです。
alweiさんの参考記事の場合、最終的には図のようにゲージが減少していくLevelが作成できます。

この場合、View, ViewModelおよびModelの関係性の概念図としては下図のようになります。

この応用として、まずModel層側のもう一つのパターンとして、ゲージを減少させるのではなく増加させるパターンを作ります。さらに、View層のもう一つのパターンとして、円形のゲージを扱うパターンを作成します。
すなわち、今回行いたいことを先ほどの概念図に追記すると、下図のようになります。

今回、Model側でのパターン作成はシンプルなものになります。まず、参考記事におけるThirdPersonCharactorをRenameし、「BP_ReduceLifeThirdPersonCharacter」とします。次に、「BP_ReduceLifeThirdPersonCharacter」をCopyし、「BP_IncreaseLifeThirdPersonCharacter」と名前を付けます。
BP_ReduceLifeThirdPersonCharacterにおけるEventTick内での処理は、図のようになっているはずです。
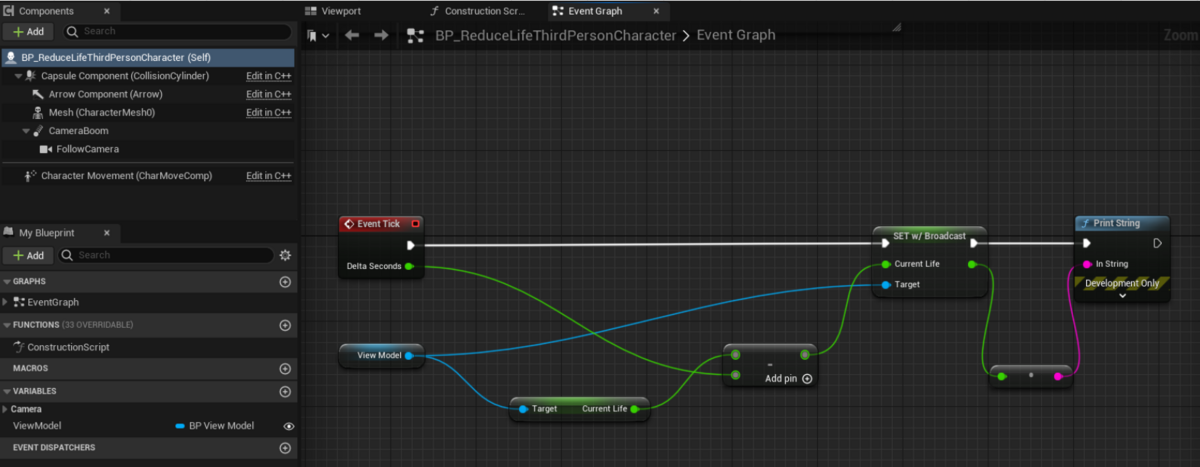
なので、増加させるパターンの場合、図のようにノードを組み替えれば「BP_IncreaseLifeThirdPersonCharacter」が作成できたことになります。

最後に、ContentsBrowserのModel層のファイルは図の二つになっています。これで、Model層での準備は完了です。

次に、View側で円形ゲージのパターンを作ります。円形ゲージ用の「M_CircleGauge」を作成します。(下記記事を参考にしています。)
また、「M_CircleGauge」のMaterialGraphはこのようになります。

そして、「M_CircleGauge」を親としたMaterialInstanceである「M_CircleGauge_Inst」を作成しておきます。
参考記事におけるWBP_LifeGaugeをRenameし、「WBP_LifeGauge_Straight」とします。次に、新しくWidgetBlueprintを作成し、「WBP_LifeGauge_Circle」と名前を付けます。そして、下図の状態になるように「WBP_LifeGauge_Circle」の状態を設定していきます。


最後に、ViewBindeingsビューにて、図のようにBP_ViewModelのSetLifePercent関数を、Image_LifeのSetOpacityにBindします。最終的に、ContentsBrowserのView層のファイルは図のようにになっています。これで、View層での準備は完了です。

では、動かしてみましょう。まず、NewLevelからBasicを選択し、新しいLevel「SampleMap」を作成します。そして、原点位置にPlayerStartを配置します。
次に、このLevelのLevelBlueprintを編集していきます。編集結果として、図のようなLevelBluePrintを組んでください。

また、WorldSettingsビューにて、DesualtPawnClassに対し、LevelBlueprintでの実装と同じCharactorクラスを割り当ててください(この場合、「BP_ReduceLifeThirdPersonCharacter」を割り当ててください)

今回はLife量は減少、ゲージは円形、といった形になります。実行すると、図のような動きになるはずです。

ここで少しLevelBlueprintについて解説してきます。まず、Construct BPViewModelノードにて、BP_ViewModelのインスタンスを作成します。
次に、Model層のCharactorクラスの取得と、ViewModelへのアタッチを行います。この際、下記図のように減少させる場合と増加させる場合の両パターンについてノードを組んでおき、切り替えられるようにしておきます。

そして、WidgetBlueprintのインスタンスを作成することで、これをBP_ViewModelに紐づくViewとします。
ここで、下図のように、WidgetBlueprintを「WBP_LifeGauge_Straight」か「WBP_LifeGauge_Circle」かを切り替えることで、円形ゲージか直線ゲージかを切り替えられる形になります。

一つ別の組み合わせとして、Life量が増加していき、直線ゲージの場合、動かすと下図のようになります。

また、そのときのLelevBluePrintは下記のようになります。

以上で、MVVMについて、UMG ViewModelによるViewとModelのパターンの拡張と切り替えを行ってみました。 この先としては、Charactor以外のModel層の例や、ViewやModelにInterfaceを使う形でDI (Dependency Injection)をする形について模索するところかなと思いますが、まぁ気が向いたらってことになりそうです。
また、サンプルのプロジェクトをgithubに公開しています。 github.com
]]>今年は開発面だけでなく、より営業/PM面に踏み込むということをしてきました。 その中で、社外とのやり取りだけでなく、社内的にもどうしていくか、といった面に対して、自分の能力の課題が見つかりました。
また、今後はどう効率的に物事をこなしていくか(もちろん質は下げずに)、そこがテーマになってくるような気がしています。
幸せなことに、わりと研究よりのお仕事に携わることが多く、以前より自分の興味領域でお仕事をさせてもらっています。 ただアカデミック的な活動はどうかというと、あまりできていない面があります。こちらの時間も作っていかないとというのが正直な気持ちです。
家族内に大きなことが発覚し、色々と大変ではありますが、なんとかやっていかなければという所存です。
まぁ今年もなんとか生きていきますw
]]>詳細はさくらサイエンスプログラムの活動報告レポートをご覧ください。
第34号:芝浦工業大学|2023年活動レポート:過去の実績を紹介|さくらサイエンスプログラム(JST)
2023年7月26日から8月4日にかけて、エチオピアのアディス・アベバ大学EiABC(Ethiopian Institute of Architecture, Building Construction and City Development)の教員2名と学生9名、計11名が芝浦工業大学建築学部建築学科を訪問し、東京デジタル・ヘリテージ・ワークショップが開催されました。芝浦工業大学からは教員2名と学生21名が参加し、企業や研究者の方々にも訪問していただきました。レクチャー、演習、体験、ディスカッション等を通じて、建築遺産における3Dデジタルアーカイブについての知識を深め、将来の活用方法について議論が行われました。(さくらサイエンスプログラムの報告記事から引用)
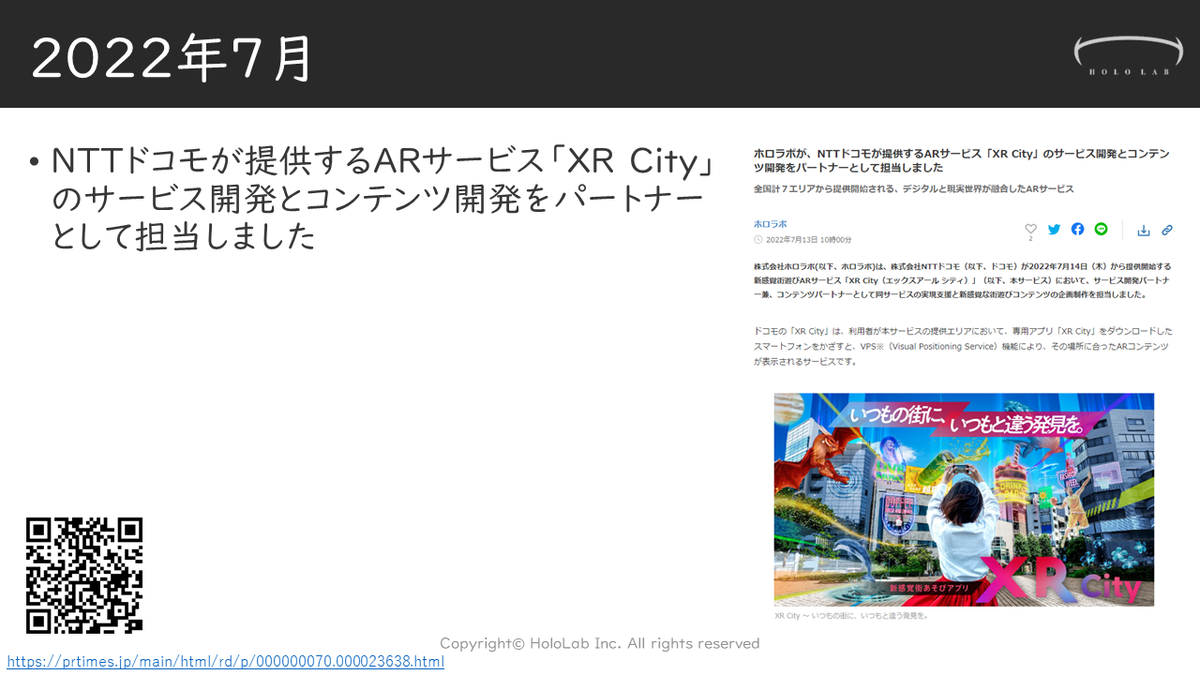
ホロラボからは中村薫、山田沙知氏の両名からAR技術を使用したまちづくりプロジェクトの事例紹介を行いました。
テーブルの上に敷かれた地図上にあるQRコードをHoloLensやiPadを通して見るとARの建物が浮かび上がるなど、市民参加型まちづくりの新たな手法を展示しました。 プロジェクトについては関連記事などをご覧ください。
展示依頼や登壇、講師依頼は随時受け付けていますので、HPより気軽にお問い合わせください。
]]>各イベント・展示会の詳細についてはお問い合わせください。
]]>清水寺の参道「産寧坂」「二年坂」「八坂通」の町並みや食べ物をフォトグラメトリによりデジタルアーカイブ。
生成したデジタルツイン空間をVR化&メタバースプラットフォームへ移植しました。
下記リンクより体験いただけます。
今回は一眼カメラは基本使用していないのです。
八坂の塔だけは一眼使ったのですが、町並みは全て360度カメラの動画。
なぜ一眼ではないのかというと、世界各国から観光客がやってくるような場所なので撮影できる時間が限られ、一眼では時間がかかりすぎて間に合わないからでした。
夏至の時期を狙い朝4:30から撮影開始したけれど、それでもちらほら人がいる。さすが京都随一の名所スポット。
なのでガチフォトグラメトリ品質ではないのは少々心残り。
下記の通りレーザースキャンも行ったが今回は活かしきれなかったか。
より詳しい撮影方法については東京大学にて登壇した際のスライドがありますのでこちらをご参照ください。

レーザースキャナRTC360でレーザースキャンしたのが2022年11月。
Insta360 One RS 1-inchで動画撮影したのが2023年7月。
というわけで現地の状況が結構変わってしまい。
本来はレーザースキャンデータとInsta360のデータを併用してメッシュ生成する予定でしたがだいぶおかしなメッシュになってしまったので、アライメントまではRTC360を利用していますがメッシュ生成以降は使用していません。
アライメントではレーザースキャンデータを使用しているので地理的な意味では結構な精度で一致。今回は約600mのエリアを生成しましたが地図ともしっかり合致。
今回も生成にはRealityCaptureを使用。
読み込ませた画像の総数は、

たべものスキャンは鮮度が命!?
現地で購入した饅頭やきんつば等、京都から関東の自宅まで持って帰ってくると形も崩れてしまうので、食物はすべて宿泊先の部屋でフォトグラメトリ撮影しました。
持っていける機材も限られていたので、百均で買ったビニール袋ラックとテグスを組み合わせて。

せっかく京都なんだしガチなフォトグラメトリもしたいところだったわ。
レーザースキャンと一眼をフルに使った本気バージョンやりたい。
また京都行こ。
京都をVR化してみた!
スマホでも体験いただけます。清水寺への参道を丸ごと再現。
実際の現地の町並みや和菓子をフォトグラメトリによりデジタルアーカイブ。バーチャル食べ歩き観光できちゃいます〜
VRの起動は続きから。 pic.twitter.com/TmvwTMn6bZ— 龍 lilea (@lileaLab) September 28, 2023
Togetterにまとめました。
https://togetter.com/li/2232605
京都VRを取り上げていただきました。
「MoguLive」様
https://www.moguravr.com/kyoto-vr/
「メタカル最前線」様
https://metacul-frontier.com/?p=7884
手順は公式GitHubのREADMEにもありますが、こうした環境構築に慣れてない自分は結構てこづったので、必要な手順を細かくまとめました。
・こちらはWindows用の手順です。
・環境構築やコマンドラインでの使い方にハードルを感じる場合は、GUIでの操作が可能なJawsetのPostshotが便利です。

記事の最後にその手順をまとめました。
データをDLして専用ビューワーで開くのみです。
環境構築や自前のデータを用意せず3D Gaussian Splattingがどんなものか触ってみたい人向け。
環境構築手順はこちらの方もまとめられているので、うまくいかない場合はこちらも合わせて参考にしてみてください。
・The NeRF Guru氏 – YouTube
・Alex Carlier氏 – ブログ
・ft-lab氏 – ブログ
上記サイトでは3D Gaussian Splattingを使ううえでその他の便利な機能の導入も紹介されていますが、以下にまとめた手順は純粋にGaussian Splattingのみを使うためのものです。
前提としてHardware Requirementsをクリアしてる必要があります。
(VRAMは24GB推奨ですが足りなくとも処理自体は可能 詳しくはFAQ参照)
ハードがOKであれば、Software Requirements に書かれている必要なソフトを用意します。
Software Requirements
・Conda (recommended for easy setup)
・C++ Compiler for PyTorch extensions (we used Visual Studio 2019 for Windows)
・CUDA SDK 11 for PyTorch extensions, install after Visual Studio (we used 11.8, known issues with 11.6)
・C++ Compiler and CUDA SDK must be compatible
具体的には以下に順に説明します。
・C++ Compiler for PyTorch extensions (we used Visual Studio 2019 for Windows)
Visual Studio 2019 をインストールする。
インストール出来たらVisual Studio Installerを立ち上げる。
「C++ によるデスクトップ開発」が必要なのでこれを有効にする。

・CUDA SDK 11 for PyTorch extensions, install after Visual Studio (we used 11.8, known issues with 11.6)
CUDA Toolkit 11.8が必要なのでインストールする。
(私の環境には元々CUDA 11.7が入ってたのでそのまま進めたが、だめだった。ちゃんと11.8を入れる)
インストーラーは ここ からDL。

インストールしたら、システム環境変数を確認する。

CUDA_PATHの値がインストールしたCUDA11.8のバージョンになっていることを確認する。
別のバージョンになっていた場合は11.8のパスを指定する。
環境変数のPathも以下の通り追加する。

C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.8\bin
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.8\libnvvp
後の手順でcl.exeへの参照があるので、事前に
C:\Program Files (x86)\Microsoft Visual Studio\2019\Community\VC\Auxiliary\Build\vcvars64.bat
のバッチファイルをダブルクリックで実行し環境変数を設定する。

実行すると一瞬黒いコマンドプロンプトの画面が立ち上がりすぐ消える。
GitHubからクローンするのでGitをインストールする。
https://git-scm.com/
Gitのインストールが必要なのは、GitHubからはzipファイルのダウンロードではなくクローンするため。
zipダウンロードだとサブモジュールが読み込まれないので注意。
Gitをインストールしたら、コマンドプロンプトを起動する。
GitHubからクローンするのでクローン先のディレクトリを作成し、そこへ移動する。
例) cd E:\Git\lileaLab\GaussianSplatting

クローンする。
git clone https://github.com/graphdeco-inria/gaussian-splatting --recursive

末尾にある --recusiveはサブモジュールもインストールするためのオプション。
・Conda (recommended for easy setup)
Pythonの仮想環境を使うため、Anacondaをインストールする。https://www.anaconda.com/
インストールできたら、Anaconda Promptを起動する。
SET DISTUTILS_USE_SDK=1を実行する。

※DISTUTILS_USE_SDKとは こちら を参考
クローンしたディレクトリに移動する。
例) cd E:\Git\lileaLab\GaussianSplatting/gaussian-splatting

conda env create --file environment.ymlコマンドで仮想環境を作成する。

ここでエラーになる場合は、前手順で用意したソフトのバージョンや環境変数の設定に誤りがないか見直しましょう。
環境構築は以上。
独自データの作成ではCOLMAPが使われるのでGitHubからDLしインストールしておく。
https://github.com/colmap/colmap/releases
インストールしたら環境変数を設定しておく。

独自の画像データを用意したら、一つのフォルダにまとめる。
ここでは仮にDataとする。Dataフォルダ内にinputフォルダを作成し、その中に画像を一式入れる。
Data
└input
. ├image0001.jpg
. ├image0002.jpg
. ├image0003.jpg
. ︙
独自データの作成にはクローンしたデータ内にあるconvert.pyを使う。
オプションでCOLMAP.batの場所と、独自データを保存したフォルダを指定する。
例) python convert.py --colmap_executable "D:\GoogleDrive\ProgramFiles\Colmap\COLMAP.bat" -s E:\Git\lileaLab\GaussianSplatting\Data
しばらくするとCOLMAPデータが出来上がる。
(写真の枚数や解像度によってそこそこ時間かかる)
トレーニングの実行にはtrain.pyを使用する。
前手順で作成したCOLMAPデータのフォルダを指定する。
例) python train.py -s E:\Git\lileaLab\GaussianSplatting\Data
写真の枚数によってそれなりに時間かかる。
トレーニングが完了すると gaussian-splatting > output フォルダ内に「123456ab-1」の様なランダムな文字列のフォルダが作成されている。
このフォルダを次の手順で用意するビューワーで読み込む。

RuntimeError: CUDA out of memory
対策A) 写真をリサイズして小さくする
対策B) –densify_grad_threshold を増やす
デフォルト0.0002 2D位置勾配に基づいてポイントを高密度化するかどうかを決定する制限
対策C) –densification_interval を増やす
デフォルト100 高密度化する頻度(100回の反復ごと)
対策D) –densify_until_iter を減らす
デフォルト15_000 高密度化が停止する反復
ビューワーを使用してトレーニング済みデータを読み込む。
ビューワーは こちら にビルド済みの実行ファイルがあるのでこれをDLし解凍する。

解凍したviewers

コマンドプロンプトでviewersフォルダへ移動し、オプションに上記手順で作成したトレーニング済みデータのフォルダを指定して実行する。
例) E:\Git\lileaLab\GaussianSplatting\viewer\bin\SIBR_gaussianViewer_app -m output\123456ab-1

ビューアーが立ち上がる。
操作方法は少し特殊。
移動はWASDQEだけど、視点の回転はマウスではなくUIOJKLキーになっている。
両手で操作する感じ。詳しくはこちら。
マウス操作で見たい場合は、Yキーを押すとトラックボールモードになりマウスで画面操作できるようになる。
以上!
こりゃ次世代の自由視点映像だ。#GaussianSplatting
60fps出るからドローン映像かのような滑らかさ。
NeRFと比べかなり鮮明で軽快。独自写真データでの生成手順、使い方もブログにまとめました!https://t.co/cscf2CyHkN pic.twitter.com/btV1Oj1XIl
— 龍 lilea (@lileaLab) September 4, 2023
環境構築や独自データの用意はせず、Gaussian Splattingがどんなものなのかとサンプルだけ実行してみたい場合の手順です。
(トレーニング済みデータをビューワーで閲覧する)
README の初めにあるリンク「Pre-trained Models」からトレーニング済みサンプルデータをDLする。

同じくその隣にある「Viewers for Windows」からビューワーをDLする。

DLしたらコマンドプロンプトでビューワーの実行ファイルを指定し、オプションで開きたいサンプルデータセットのフォルダをオプションを指定する。
それぞれDドライブ直下に解凍した場合の例) D:\viewers\bin\SIBR_gaussianViewer_app.exe -m D:\models\bicycle
ビューワーが立ち上がる。

ビューワーの操作は前項目で書いたものと同様。
以上。
]]>fatal: Cannot determine the organization name for this ‘dev.azure.com’ remote URL. Ensure the ‘credential.useHttpPath’ configuration value is set, or set the organization name ase the user in the remote URL ‘{org}@dev.azure.com’.
error: (以下省略)

Visual Studioを開きメニューのGitから設定を開く。

Gitグローバル設定の資格情報ヘルパーをGCM Coreに変更する。

以上。
これで再びプッシュできるようになった。
調べるたびにメモしていたものですが、ソースをメモしそびれいたので随時ソースのリンクも足していこうかなと。
そのソフトウェアやサービスの公式の情報が簡単に見つからなかったものは、スクショを検索してそこに写る座標から判断しています。
もし間違っているところあったらご指摘ください。
| 左手 | 右手 | |
|---|---|---|
| Y-up | Unity | Maya |
| LightWave | modo | |
| Zbrush | Substance Designer / Painter | |
| Cinema4D | Houdini | |
| Quixel Mixer | Godot | |
| DirectX | Mine craft | |
| Metal | Softimage | |
| Motionbuilder | ||
| KATANA | ||
| Nuke | ||
| Fusion 360 | ||
| After Effects | ||
| Dimension | ||
| 3D-Coat | ||
| TouchDesigner | ||
| Shade3D | ||
| Metasequoia | ||
| Xismo | ||
| Xenko | ||
| Roblox Studio | ||
| Buildbox | ||
| OpenGL | ||
| Vulkan | ||
| Marvelous Designer | ||
| Solidworks | ||
| Inventor | ||
| iCAD | ||
| CloudCompare | ||
| AzureRemoteRendering | ||
| ARKit | ||
| Vision Pro | ||
| Z-up | UnrealEngine | 3dsMax |
| blender | ||
| SketchUp | ||
| Souce | ||
| AutoCAD | ||
| Photoshop | ||
| Stingray | ||
| Lumberyard | ||
| CryENGINE | ||
| Rhinoceros | ||
| Civile 3D | ||
| Vectorworks | ||
| NX | ||
| Revit | ||
| ARCHICAD | ||
| formZ | ||
| Catia | ||
| Rebro | ||
| Parasolid | ||
| InfiPoints | ||
| RealityCapture | ||
| Twinmotion |
こちらのURLで無料で頒布していますので、 よろしければご一読ください。
メンバーそれぞれが今興味がある技術について書いたごった煮な技術同人誌となっています。
国土交通省が主導する3D都市モデルオープンデータPLATEAUをランタイムロードする仕組みを構築しました。
路地、その魅惑の空間へのいざない。路地入門から3Dスキャンの方法を紹介します。
LumaAIという写真や動画からの3D再構築サービスのAPIを使ってみました。
Ready Player Meという3DアバターサービスをUnityに組み込んでみました。
Unity Cloud Buildをなんとか使いやすく。実案件で培ったノウハウとツールを紹介します。
よろしくお願いします。
]]>
「HoloLab Conference」はホロラボとともに新しい技術をいち早く使いこなす企業様と、それを支えるエンジニアの経験を広く共有し繋がり、より多くの人たちがこれらの技術を体験できるようにすることを目的とした「場」です。
各企業様とホロラボが取り組みを進めてきたMixed Realityの実⽤に向けた取り組みや、BIM/3D CAD/3D CG/点群のような3Dデータ活用に向けた取り組み、GPS/VPS(Visual Positioning System)/PLATEAUのような空間情報技術活⽤に向けた取り組みの事例共有の場として「HoloLab Conference 2023」を開催します。
昨年も「HoloLab Conference 2022」を実施し、参加された企業様からのフィードバックや開催後のアーカイブ動画など、⾮常に盛況に終えることができました。

オンライン一般参加をご希望される方は、下記ページよりお申込みください。 https://hololab.connpass.com/event/276961
オンライン一般参加では、Zoomでのリアルタイムセッション視聴/質疑応答が可能です。
※当日のセッション視聴方法についてはお申し込みいただいた方に別途ご案内させていただきます。
実用に向けた取り組みをされている各社様とホロラボ合同の事例セッションと、基盤技術や技術調査などについての技術セッションの2種類のセッションを実施します。セッションは2タイムテーブルの進行で合計で最大15セッション程度を予定しています。
また、後日セッションはアーカイブとして公開する予定ですが、映像や音声の編集や一部セッションが非公開になる場合があります。ぜひリアルタイムでご参加ください。
会場施設と連携し各種ガイドラインを遵守とした感染対策の実施を予定しています。
・東京都様式「イベント開催時のチェックリスト」の公表
Holoconf23_東京都様式_イベント開催時のチェックリスト.pdf - Google ドライブ
株式会社ホロラボ イベント窓口:event@hololab.co.jp
※本記事に記載されている会社名および製品・サービス名は、各社の登録商標または商標です。
]]>6年目の年末が終わりました。 ホロラボも6期目が終わり、7期目に入りました。
引き続きアウトプットを出しつつも、少しずつ変化が出始めた年になったと思います。 スライドはこちら。
過去のふりかえりはこちら
全体の状況としては、コロナ禍は継続しつつも現場が戻ってきており、2022年の後半は出張も増えてきました。一方で、物理空間とデジタル空間をつなげる取り組みも引き続き続いています。
アプリ開発については、デバイスを使いつつも、それを広げるためのWebシステムやデータ準備の重要度が上がってきました。 後でも紹介しますが、Webアプリを主業務とするエンジニアに新たに加入、社内でロールチェンジしてもらい、いままでのメンバーと合わせてが10人になりました。 データについても新設したSIAR(サイアー : 空間情報技術)チームが1年を通して忙しくするほどにお引き合いをいただきました。 これによって、クライアント・デバイスアプリで使うための下地(Webシステム)とそこを通すデータがそろう形になります。
引き続きの注力分野であるクライアント・デバイスアプリについては、実運用を見据えて具体的な取り組みが増えています。
これらが、メンバーのロールやアウトプットの変化につながっています。

売上については堅調に推移しています。 ここには出していませんが、この2年くらいで業務体制の改定をしており、利益については大幅に改善をしています。

2022年も15人の方に新しく入社いただきました。
2021年も15人の方が入社、現在60人のため、この2年で倍の人数になりました。

概要でも書きましたが、特筆すべきはロールとしてWebのエンジニアが大幅に増えています。
2022年は5人の方にWebエンジニアとして入社いただき、3人の方がデバイス系のアプリエンジニアからWebエンジニアにロールが変わっています。
いままでWebエンジニアとして活躍していた2人と合わせて、計10人の体制となっています。

居住地については変わらず全国各地にメンバーがいる状況です。継続してフルリモートでの業務になり、それをメリットとして転職される方も多くいます。

2022年も多くのアウトプットを出すことができました。 関わっているメンバーや快く事例公開をしてくれるお客様に感謝です。
大きな仕事の一つとしては、NTTドコモ社/NTTコノキュー社のXR Cityの開発パートナーとしてサービスのリリースに関われたことです。
世界的にも類を見ない大きなサービスに関われリリースにたどり着けたことは非常に大きな経験だと感じています。
自社サービスの中心であるmixpaceは、粛々と開発を進めつつ、リコー社のバーチャルワークプレイスとの連携のリリースを行うことができました。 mixpaceはBIMやCADなどの3Dデータを即座にARなどで閲覧できる形式に変換します。これをVRに持っていくことでVRでの遠隔コミュニケーションに利用することが可能になりました。
変換については、さまざまなデータ形式への対応、同じデータ形式でも作り方によって変換結果が変わるため、リリースより積み重ねてきた知識と経験のなせる技だと自負しています。

2022年の新しい取り組みとして建設に特化したAECチームと、3Dスキャンやフォトグラメトリに特化したSIAR(サイアー : 空間情報技術)チームを新設しました。
こちらもおかげ様で好評で、多くの依頼をいただいています。

アウトプットできた取り組みとしては、日建設計社とCyber-Physical Workplaceの取り組み。

東京メトロ社と総合研修訓練センターの3Dスキャン・フォトグラメトリが挙げられます。

このほかにもさまざまな取り組みを行いました。
昨年から広がっている広域の取り組みでは、国土交通省のProject PLATEAUで2つのプロジェクトに参画しています。 一つは東京都八王子市での街づくりへの適用、もう一つは静岡県沼津市でのモビリティへの適用です。
HoloLensで部屋から始まった取り組みが、都市まで広がってきた一年でした。

これらの取り組みのいくつかは「HoloLab Conference 2022」としてお客様と一緒に事例の公開をしています。
HoloLab Conference 2022 - Program Schedule | ConfEngine - Conference Platform

これらの取り組みは個別の案件である一方で、会社全体としてみると繋がっている中での活動になっています。 HoloLensのアプリ開発から始まったホロラボですが、いまでは「3Dを扱う」ということが共通項になっています。
デバイスはもちろんのこと、それを扱うインフラ、データと広げています。
2023年も引き続きご愛顧・ご注目のほどよろしくお願いいたします。
]]>というわけで、もう少し具体的に振り返ろうかなと思います。
今年は開発面において、コーディングもやりますが、開発管理であったりお客様と話すことが多くなりました。 ある意味で裁量も増えている認識です。 あとは技術の範囲も多岐にわたっています。GNSS系だったりNeRFなどの機械学習だったり。 広く浅く、みたいになってますが、深く突っ込んでいかないととも思いつつ。
あとUnrealEngine始めました。んー、ちゃんと開発面でのセオリーだったりを学ぶ必要があるなぁと感じています。 例えばどういったときにBPで書いて、とどういったときにC++で書いて、という分け方。 BPよくわからんのでC++で書いていましたが、この辺結構明確に決めて開発しないとーとは思います。
IDW'22というWorkshopで発表してきました。現地開催(福岡)ということで、コロナ禍で英語力も上げないとなー、という悩みも出てきました。 どんどん学会発表も多くしていきたいし、そのための研究としてアウトプットを出していきたい所存です。
150kg -> 120kg程までダイエットできました!ダイエットというか、筋トレ+食事の見直し、そして徹底。 筋トレが楽しくなってきたので、来年も続けて一旦90kgくらいまでを目標として続けたいと思います。
来年も頑張っていきますw
]]>UnrealEngine(以下UE)のpreviewバージョンの最新版、preview5.1が公開されましたね。

このバージョンではなんと、VRでLumenやNaniteが動作します。
パブリックロードマップはこちら。
Preview版ということでまだ不安定(※1)なところはありますが、.exeパッケージを作成できましたので触って頂けましたら幸いです。
まえArchiVizDiveでつかったコンテンツをLumenVRでパッケージ化できた。
— moz (@momomo_moz) 2022年10月20日
さすがにハードウェアレイトレは無理やった。
でもマシンスペックさえ用意できればPCVR爆速構築できるようになったのは凄すぎる。#UE5#LumenVR pic.twitter.com/E77cPcKjAh
動作検証環境は下記のとおりです、ぜひ他環境でのフィードバックもいただけるとありがたいです。 ・Meta Quest 2 + Oculus Link ・RTX3080Ti
今回のサンプルははUEの標準VRテンプレートをLumen対応にして、モデルデータのみをインポートしただけです。
標準のVRテンプレートのMoveArea設定はNaviMeshで行われています。 MoveAreaとしたいStaticMeshのCollision設定をし、NaviMeshVolumeと詳細設定を行うだけでLumenVRが体験できます。
以前はNaviMeshで複数階や吹き抜けのある空間のムーブメントを行う場合はVRpawn内のテレポートレーザーのBPの編集を行う必要がありましたが(法線がマイナスになる部分をテレポートレーザーが認識しないようにする)、 最新のVRテンプレートならNaviMeshのサイズや位置、Detailの編集のみで立体的な空間のMoveAreaの設定が行えます。
※1.今回遭遇したのはQuiexl Bridgeのプラグインが使用できない状況
]]>この夏、ホロラボが参画している国土交通省Project PLATEAU 2022度プロジェクトの一環で、東京都立大学饗庭伸研究室と協力し、3D都市モデルとXR技術を活用した市民参加型都市開発ワークショップを開催します。
ひとつでも当てはまる方、ワークショップへのご参加を心よりお待ちしております。
お申し込みはこちらから forms.gle


ホロラボのmixpaceというサービスを牽引するエンジニアの一人、山中大輔。 ほとんどコードを書いたことがなかった山中が、HoloLensに出会い、安定の大企業からホロラボに転職するまでの軌跡を追いました!
ーーさて、、、山中さんは、どうしていつもニコニコしているんですか? (インタビュー中のトップ画像の通り、ほんとうにいつもニコやかです。)
え…?何かな…?処世術かな…?w 学生時代は、ドラッグストアでバイトしてたりとか、個別学習形式の塾でバイトしてたりして、割と人と話す機会が多かったから、自然とその場でも笑いを絶やさないことがルーツかもしれません。w
ーーなるほどw では、簡単な経歴から教えてもらえますか?
神奈川県横浜市で生まれました。親が転勤族で、東京→京都→東京に行ったりで、栃木県で中学・高校時代を過ごしました。その後に横浜の大学に通うために上京して、そのまま関東で就職して、通信系の大手SIerに入社しました。大学は情報処理系の学部でした。
 (写真1:自宅にて奥様が撮った写真。後ろに飾ってあるお子様が描いた絵がほほえましいです。手前に映っているのがHoloLens 2。)
(写真1:自宅にて奥様が撮った写真。後ろに飾ってあるお子様が描いた絵がほほえましいです。手前に映っているのがHoloLens 2。)
ーー昔からITなどに興味はあったんですか?
いやぁ、特になかったですね。ゲームばっかりやっていたし。高校時代にホームページを作ったことがあったぐらいかな。
ーー大学は何故、情報系に?
ホームページを作ってたりしていたから興味がないわけでもないし、世間的にITが流行ってるぞ、っていう理由ぐらいですね。
ーー大学ではバリバリとコードを書いて…?
いや、あんまり書いてないですね。w C言語が難しくて、あんまり書きたくなかったですね。w
ーーえ?w じゃあ、新卒で就職した会社は何故選んだんですか?
大きいし、安定してそうだな、と。よくある大企業志向というか。俗にいう、安定志向というか。
ーーえ~。w そしたら、志向が今と真逆ですね~。この後のお話が楽しみです。 前職の大手SIerでは、どんな仕事をしてきたんですか?
最初はセキュリティ系の事業をやっているところに配属されました。最初の2年間はそこでシステム運営オペレーターみたいな仕事をやりましたね。あんまり技術的なことはやった記憶がないです。
ーーなるほど。ここでもまだ技術的なことはしてないんですね。
そうですね。そのあと出向を命じられて、セキュリティ・テスター(Webサイトの脆弱性診断)をやっている子会社があったんで、そこで3年間仕事をしました。
ーーそこでいよいよ技術的な仕事を?
いえ。でも、そこは割とインパクトが大きい3年間でしたね。 前職は本体(親会社)に3万人ぐらい社員がいるんです。でも、子会社は500人ぐらい。その中で更にチームに分かれていて、こじんまりしていたんです。 それに、出向先の人から見ると(自分は)中途採用みたいなもんだから、年次とかが考慮されないというか、割と大きな単位の仕事をやらせてもらったのが、よかったんです。
ーーなるほど、技術うんぬんよりも、仕事の仕方みたいなところでインパクトがあったんですね。
そうですね。でも、出向が終わって本体に戻ると、また若手として仕事のスケールが小さくなるという感じでした。それが転職したいと思うようになったきっかけですね。
ーーそういう経験が転職のきっかけになっていったんですね。 VR、AR、MRの分野は、どうやって知ったんですか?
出向から戻ってきて、つまんないなーと思いだして、異動希望を出したんです。とにかく他のところに行ってみたくて、スマートグラスをやっている人たちが楽しそうだったので、その部署を希望して、異動しました。 自分の意志で、自分がいる環境を捨てて、外に出たいと言ったのはこれが初めてでした。
ーーここで、いよいよ技術的な仕事を…?
いえ。サービスのプロトタイプをお客さんのところに持って行って、お客さんの実証実験にお付き合いしたりしていてました。サービスは面白いけど、紹介業って感じで、仕事としてはあんまり楽しくなかったですね。
 (写真2:2017年7月。右手前が、前職の在職中にホロラボメンバーと一緒にいる山中。山中の後ろにいる3人は現職のホロラボメンバーでもあります。右上に「4年前」とあるのは、CEO 中村がFacebookから「あの頃」としてリマインドされた写真を転用したため。)
(写真2:2017年7月。右手前が、前職の在職中にホロラボメンバーと一緒にいる山中。山中の後ろにいる3人は現職のホロラボメンバーでもあります。右上に「4年前」とあるのは、CEO 中村がFacebookから「あの頃」としてリマインドされた写真を転用したため。)
ーーHoloLensとはどうやって出会ったんですか?
異動した先の仕事の関係もあって、自然とHoloLensのニュースを見たりしていました。日本でも、海外から輸入して使った人がブログを書いていたりして、スゴそうとは思っていましたね。 それで、ある会社の人に体験させてもらう機会があって、面白いかなと思って買ったんです。30万円ちょっとの高いデバイスだけど。
ーー確か、その時点でお子様が2人…。30万円のデバイスを、よく買えましたね?w
うちは、家計や貯蓄計画は全部僕がやってるんで、割と決済額はいかようにもできたんです。w 後は、あの頃は家を買うために割とちゃんと貯金はしていたので、買っちゃっても人生計画には支障はないと思って。w
で、そこから、前職の会社が開いたイベントでホロラボのメンバーとも出会い、Tokyo HoloLens ミートアップとかにも出るようになって、自分でデモアプリを作ったりするようになったんです。
ーーなるほど。興味のある方向に進みながら、プログラミングをするようになっていったんですね。 デモアプリへの周囲の反応はどうでしたか?
みんな、「面白い、面白い」と言ってましたね。 自分も、少しプログラミングをできるようになっていました。
 (写真3:山中が開発したHoloLensのアプリケーションを公開したTwitterの投稿。こちらのリンクから動画が見れます!)
(写真3:山中が開発したHoloLensのアプリケーションを公開したTwitterの投稿。こちらのリンクから動画が見れます!)
ーー転職はどうやって決めていったんですか?
何社か話は聞いたんだけれど、どうせ転職するなら、デカくて仕組みがあるところよりも、ホロラボみたいに小さくて出来立てホヤホヤのほうが面白いかな、と思ったんです。 それで、中村さん(CEO)に転職できませんか?って話をしました。
ーーとは言え、安定した大企業からの転職は悩みませんでしたか?
揺れ動いていましたね。安定を手放してもいいのかな、と。 でも、最終的には「楽しくないな」って考えるのはつらくなったんです。それで、奥さんも働いているし、なんとかなるなって考えるようになりました。
ーー奥さんからの反対はありませんでしたか?
奥さんは最初はネガティブって感じだったんです。そこで、奥さんに気持ちよく送り出してもらうために、半分演技、半分本心で、思い詰めた感じを出していたら、「そこまで(思い詰めてるん)だったら、いいよ」となりました。w
ーー「嫁ブロック」への対策が秀逸ですね。w ホロラボでは、どんな仕事をしてきましたか?
入社当初は、Unity(2D・3Dによって開発できるゲームエンジン)から始まりました。HoloLensを使って機械の修理手順を表示するようなアプリを2件と、未来の車をシミュレートするような開発案件を1件ほど担当しました。 その後に、mixpaceというサービスのWebエンジニアが必要だけれど、社内にいないし、募集も難しいから誰かいないか?という話があって、手を挙げました。 今は、mixpaceチームで、Webのフロントエンド、裏側のWebアプリケーション(APIサーバー)の実装と、CAD・BIMデータを変換するコンバータープログラム、Azureのクラウドインフラの構築を行っています。あとは、実際に動いているシステムのメンテナンスですね。
ーー今までコードをほとんど書いてきてないのに、Unityを経験し、Webエンジニアに転向?! どうやって学習したんですか?!
ん~どうやってかぁ。難しいなぁ。経験はなかったんですけど、じゃあ、血のにじむような努力は?って言うと、しなかったなぁ。あとは、そうだなぁ、新しいことを学習するコツっていうのは、前職で教わった気がします。前職はプログラムは書かなかったけど、プロジェクトをどうドライブしていくかっていう指導を受けたんで、学習にも活かせたんじゃないかなとは思いますね。 これは必要だっていうのを見定めて、それを深く掘っていくということですかね。
ーーその学習力、キャッチアップ力がすさまじいですね。
ーーさて、ここからホロラボの話に移りましょう。ホロラボってどういうところがいいですか?
フルリモートは自分のライフスタイルに合ってますね。それまでは、共働きなのに、奥さんに家事も育児も頼っていたんです。フルリモートになってから、子どもの送り迎えとかもできるようになって、奥さんも大分気持ちが楽になって、家庭が円満になった気がします。それはすごく感謝してます。 (※ちなみに、山中はコロナ前は週に1回程度の出社。コロナ後は出社ゼロです。)
ーーコロナが発生する以前から、フルリモートでしたもんね。
あとは、なんか、あんまりイケイケじゃないところが肌に合っていますね。w キラキラしていないというか、はしゃぎすぎていないところというか。イケイケのベンチャーみたいな雰囲気じゃなくて、おっさん臭いところが合ってますね。w 上昇志向がないわけじゃないけど、チョー意識高いわけでもなく、地に足のついた人が多いという感じがします。コミュニケーションでそんなにストレスを感じないっていところもいいですね。
ーー確かに落ち着いた人が多い印象ですね。 今、Webエンジニアを募集していますが、どんな人に入ってきてほしいですか?
技術的には、Webをやってきて、3Dのアプリケーションに興味がある人に来てほしいですね。逆に3Dをやっていて、Webをやってみたいっていう人もWelcomeです。 あとは、喋りながら進められる人がいいですかね。最近はできるだけコミュニケーションしながら作ることを実践するようにしているんです。ペアプログラミングとかをやってたことがある、やってみたい、人と話すのが苦じゃないっていう人が来てくれると嬉しいなと思います。
ーーずばりホロラボのおすすめポイントは?
技術的好奇心が高い人がいっぱいいるんで、日常的に技術の会話ができますね。今の仕事をする中であんまりそういう会話ができていないって人にはいいと思います。職業エンジニアの集まりが嫌だって人にはオススメですね。
ーーホロラボは「つよつよ」で技術大好きなエンジニア集団という感じがしますよね! 今日はありがとうございました!
ありがとうございました。 (了)
]]>
白木が大手SIerのプロジェクトマネジャー(PM)からホロラボに転職したのは2018年、38才のとき。 「転職は35才まで」などと囁かれることもありますが、白木はどんな考えでホロラボに入ったのか?そして、どんな仕事をしているのか?を聞いてみました。
ーーまず、、、白木さんはどうして髭を生やしているんでしょうか?w
ホロラボに入ったら、ちょんまげの人が二人いたんですね。それで差別化しようと思って。w それと営業(PM)として、お客さんに顔を覚えてもらえます。w ちなみに前職では、「髭を生やしたらダメ、辞めろ」と言われてました。
ーーなるほどw では、前職までの簡単なプロフィールをお願いできますか?
生まれは山口県下松市です。高校まで地元で、福岡大学に進学しました。 卒業後に、大手電機メーカーF社の九州にあるシステム系子会社に入り、10年ぐらいして親会社の方に出向して、東京に来たんですね。そこで病院向けの電子カルテのPMをやりながら5年ぐらい経って、「(九州には)帰りたくない」ってゴネたんです。で、そのまま東京勤務を3~4年ぐらい続けて、ホロラボに転職しました。
ーーえ?どうして九州に帰りたくなかったんですか?w
福岡、九州の人って地元が好きだけど、自分はそこまでの地元愛は持っていなくて。それと東京の方が色々と楽しいことがたくさんある。

ーー楽しいことって、具体的には何ですか?
2016年ぐらいにOculusというVRゴーグルを知ったんですね。それでなんとなく買ったんです。で、アプリを作ってTwitterとかでつながっているコミュニティがあって、積極的に参加していっていたんですよ。地方だとそういうこと自体が難しいので、参加もできなくなっちゃうし。
ーーなるほど。それで、そこから、xRの分野に興味を持っていくんですね。 どんなことをしてたんですか?
例えば、Kinectで自分の骨格を検出して、自分の好きなアニメキャラクターをVR空間に出して、自分と同じ動きをさせたりしてました。w 自分が作った動画が2万リツイートされたこともありました。
ーー2万リツイートってすごいですね! そのあたりから転職を考えるようになったんですか?
いや、その頃は転職なんてみじんも考えてなかったんですよ。 VR、Kinect、Unityってベースが自分にできてきて、次にHoloLensが出たんです。日本では買えなかったんですけど、たまたま知り合いのつてで買えたんですよ。40万円ぐらいで。 今までは(VRだと)コンピュータ空間に入っていたんだけど、これは現実の空間に情報を重畳できる。 これはすごいな、マウスとディスプレイが必要なくなる時代が来るなと思った。
ーーHoloLensに大きな可能性を感じたんですね。
で、会社の中で仕事にできないかと思って、上司に見せたり、お医者さんに見せたりしていたが、あまり反応がなかったんです。 あと、新しいビジネスをやっていこうというお題目のグループがあったんですけど、予算が出るわけじゃないし、不満がある人のガス抜きの場みたいになっていた。 それで、大きな会社では事業以外のことはできないんだろうなと思ったんですよ。 で、電子カルテもあまり興味のある範囲じゃなかったし、実際に転職するかどうかは別として、転職活動を始めてみたんです。
 (写真2:HoloLensを操作中。白木から見えている景色がモニターに映し出されています。)
(写真2:HoloLensを操作中。白木から見えている景色がモニターに映し出されています。)
ーー転職活動って、まずは始めてみるっていうのは大事ですよね。 ホロラボとはどうやって出会ったんですか?
Tokyo HoloLensミートアップというコミュニティに行ったときに、ホロラボメンバーの1人が「PMを探している」ということで、受けてみよっかなーと軽い気持ちで面談しました。 ちなみに、それまで大手のSIerの採用面談を受けて最終面談で落とされていました。その時、私を落とした面接官の人は、先にホロラボに転職していて、プロダクトマネジャーをやっています。w
ーー自分を落とした面接官が、自分の転職先に先に転職してるってすごい縁ですねw ホロラボに決めた理由はなんですか?
ホロラボはベンチャーやスタートアップじゃなかった。それまで受託ビジネスをやってきていたし、いわゆる中小企業です。だから、ある程度長く生きていけますよね。 それに、xRしかやっていない。「xRも」やっている企業だと、いざ転職しても、「xRをやってもらうとは言ったけど、まずはここで」とか言われて配属先が違ったり、希望の部署に配属されても部署異動になってしまうこともある。xRが専業の会社ってほとんどないんですよ。
ーー白木さんのxRに対する熱量を感じますね~。 アラフォーでの転職は怖くなかったですか?
そりゃあ、転職は怖いですよ。「転職は35才まで」なんていう話もあるし、当時38才だった。でも、今の仕事を定年までやるのか?とは思いました。 あと、人生には10年に1度ぐらい大きなチャンスはあって、それに乗るか乗るないかは逃さないようにしてましたね。
ーーなるほど。やりたいことや大きなチャンスに思い切って飛び込んでみたんですね。
はい。あと、前職での楽しくない、つまらない仕事は意外に役に立つんですよ。w つまらないというのは自分の場合は、電子カルテで、それがxRに換わればいいんです。 基本的には、PMとしての仕事は同じなので。
ーーそれは転職のハードルを下げてくれそうですね。 ホロラボではどんな仕事をしてきましたか?
前職が大手SIerだったので、大手のお客さんが相性が良いだろうということで、JR東日本さんや電気会社さんの案件などを担当しました。(※ページ最後に、案件例のリンクを貼っています。) 実際に相性はよかったです。相手の論理が分かるので。 例えば、向こうの社内の論理も分かる。予算感が大前提にあるとか、決済額がどれぐらいとか。 あとは、システム系子会社にいたし、実際に案件の窓口になるお客さんは同じような立場なので、そういうところで話が合いましたね。
ーーそういったところも前職の経験が役に立つんですね。 逆に、前職とホロラボで、仕事でどのような点が違いますか?
前の会社は大規模システムなので、ウォーターフォールでやっていたんです。ホロラボの案件はどっちかっていうと、機能を作ってみて体験して、そのフィードバックを元に改善していっている。 だから、アジャイル、リーンスタートアップという考え方が強くなりますね。
この業界は作るものがあってないようなもの。現状はPoC案件が多いので、お客さんも明確にイメージを持っているわけではないんです。だから、このデバイスだったら、ここまでこんな風にできますよっていうのを提案します。まずは、例えば絵コンテやモックアップを作って、簡単にイメージしてもらうことが多いですね。
あと、お客さんの頭の中は、映画、ドラマ、マンガとかがベースになっているので、我々とはノウハウの差が大きいんです。機械の制約もある上で、空想をどこまで現実に落とし込んでいくか、今ないものをどう考えて行くということが大事ですね。だから、イメージを共有するために現実に近いものを手早く作るようにしています。
 (写真3:最新のxRデバイス Varjo XR-3をかぶる様子。実は接続していないので何も見えていませんw)
(写真3:最新のxRデバイス Varjo XR-3をかぶる様子。実は接続していないので何も見えていませんw)
ーーお客様に具体的にイメージを湧かせる、スピード感あるやり取りが大切になりそうですね。 さて、話は変わりますが、ホロラボの良いところってどんなところですか?
割とみんな肯定的。ののしり合わないですよね。w それに、年齢の上下という関係がないです。技術は強い人が強い。プロマネでもある程度の納得はさせなきゃいけないし、腕のある人をある程度納得させなきゃいけないですよね。
ーー確かに「つよつよ」というイメージはありますね。
あと、フルリモートはすごいですよね。家の中で妻と話せる時間も増えました。前職の時にこういう環境だったら、子どもを持つことも考えたかもしれないです。 子育てにも優しいですね。男性でも産休・育休で休んでます。
ーーはい。現時点(2021年6月時点)で、男性育児休業取得率は100%ですね。 他に、おすすめポイントなんかはありますか?
インターネットの黎明期は、HTMLを書けただけで仕事が来ました。自分は次の波がAR、VR、MRだと思っています。その波に乗っておくのは「おいしい」はずです。 それに初期から関わっていると、その分野のコアが身につくし、ずっと蓄積ができるから強いですよね。
ーー最後に記事をここまで読んでいただいた方に一言お願いします。
まあ、やってみたらどうにかなるよね、っていう…。w やらなければ始まらないですよね。 意外に今までのことは無駄にならないです。あとは楽しく生きるためにはどうしたいいかを考えてもらったらいいんじゃないかなと思います。
ーーまさにその言葉の通り、白木さんは行動してきていますよね。 今日はありがとうございました!
ありがとうございました。
(了)
]]>
HoloLens発売から5年。コンシューマーの事例がVRやメタバース方面で盛り上がりを見せる中、BtoB方面ではMixed Realityの技術検証フェーズから実用フェーズに向けた取り組みが着実に進んでいます。一方で、こうしたBtoB方面の取り組みにフォーカスを当てた発表の場が少なく、先行して取り組みをされている企業様同士の交流や、これから取り組みを始める企業様の情報取集の場の必要性を感じていました。
そこで、ホロラボが各社様と取り組みを進めてきた実用に向けた取り組みや、今後メタバースの基盤技術となっていくBIM/CADやCGといった空間情報技術活用に向けた取り組みの事例共有の場として、「HoloLab Conference 2022 #HoloConf22」を開催します。
オンライン一般参加をご希望される方は、下記ページよりお申込みください。 https://hololab.connpass.com/event/241174
オンライン一般参加では、zoomでのリアルタイムセッション視聴/質疑応答、ホロラボDiscordサーバーでのオンライン参加者同士のリアルタイムチャットコミュニケーション(任意)が可能です。
※当日のセッション視聴方法やホロラボDiscordサーバーについてはお申し込みいただいた方に別途ご案内させていただきます。
実用に向けた取り組みをされている各社様とホロラボ合同の事例セッションと、基盤技術や技術調査などについての技術セッションの2種類のセッションを実施します。セッションは2タイムテーブルの進行で合計で最大15セッション程度を予定しています。
また、後日セッションはアーカイブとして公開する予定ですが、映像や音声の編集や一部セッションが非公開になる場合があります。ぜひリアルタイムでご参加ください。
ご登壇予定企業様(敬省略) ※3/17時点での情報になり、10社様程度を予定しています。
ホロラボセッション情報 ※3/17時点での情報になります。
会場施設と連携し各種ガイドラインを遵守とした感染対策の実施を予定しています。 感染症流行状況に応じて、オフライン会場の無観客開催もしくは、会場を利用しない完全オンライン開催への切り替えを予定しています。
(2022/4/26追記)
・東京都様式「イベント開催時のチェックリスト」の公表
記入済み_東京都様式イベント開催時のチェックリスト.pdf - Google ドライブ
株式会社ホロラボ イベント窓口:event@hololab.co.jp
※本記事に記載されている会社名および製品・サービス名は、各社の登録商標または商標です。
]]>
実家のリフォームをきっかけに建築に興味を持ち、建築学科に入学。研究室では閉校した学校のリノベーション活用や、空き家の民泊活用などを研究していました。
内装を変えるだけで人がまた集う空間になるということに興味を持ち、内装業界を目指しました。
大学から建築を勉強されていたのですね。
はい、就職活動ではリノベーションや内装といったところを軸に応募し、中でもカルチャーを大事にしながらも新しいことに挑戦し続けている商業施設の会社に惹かれ、そこの内装設計部門に就職。5年間テナント設計を行っていました。そんな中で「BIM(Building Information Modeling)」という技術に出会い、3Dで空間のデータを構築していくことの面白さやAR/VR/MR技術を使ったデータの活用に感銘を受け、建築情報学分野に興味を持ちました。ホロラボでは2021年4月~業務委託契約、10月から正社員として働いています。
去年からだったんですね!今ではなくてはならない存在のように思えます。
ホロラボとの出会いはどこだったんですか?
前職でBIM推進のお仕事をしていたのですが、その情報収集をするのにTwitterを活用していました。そこでmixpaceのアカウントや建築情報学会メンバー、フォトグラメトリの龍さん、BIM講師のタケルさんをフォローしていました。どうやらみなさん繋がりがあって、ホロラボという会社がこの中心にいるな?と気付いた頃に、ちょうどBIMが扱える人の求人のツイートがホロラボから上がったんです。気になる!と引用RTしてみたら武仙さんからその日のうちにDMが飛んできたのがきっかけです(笑)
Twitterから!ホロラボでは結構多いですよね(笑)
Twitterから、多いですよね! お話をしてみたら非常に皆さん気さくで、かつBIMやMRへの希望や熱意にとても共感出来て、最初にDMをいただいてから2週間くらいで転職を決めちゃいました。入ってみたらホロラボ社内にTwitterでフォローしていた人が溢れていて驚きました(笑)
フォロワーが同僚になっちゃうのすごいですよね、入社してからも結構Twitterでやりとりしちゃいます。
みんなツイッタラーですよね(笑)
主にmixpaceをご利用されるお客様のサポートをしています。 mixpaceをご利用されたいお客様のデータが問題なくご利用いただけるか、事前にデータをお預かりして実際にiPad / HoloLens 2で表示が出来るかを確認します。ご利用中のお客様からのお問合せにも対応しており、データをお預かりして不具合状況を調べ、最適にご活用いただけるように手順をお伝えします。
不具合状況を調べるのは、建築の知識があって出来ることですね。
最近はそういったサポートで得た知見をmixpaceサポートデスクに残す仕事も増えてきて、文章を書く仕事が多くなってきた印象が強いです。データ検証と文章を書く仕事で右脳と左脳を駆使しています。
mixpaceサポートデスクではいつもお世話になっていますが、改めて何をされているのか聞くと面白いです。
元々Revitを扱っていたので建設業のお客様からのお問い合わせには対応しやすいのですが、建設業に限らず様々な業種のお客様も増えてきており、その分ソフトウェアやデータの種類の幅も増え、難しいサポート対応が増えてきました。ただ、mixpaceにお申込みいただくお客様の多くは社内でDX推進を行っている方や新しい技術を活用して業務を改革しようという熱意のある方ばかりなんですよね。なので、様々な業種の最先端を拝見できる感じがします。このデータは何に使われるのだろうとか、こういう表示の仕方があるのかとお客様から学ぶことも多く、非常に面白いです。
ホロラボに入る前は新卒で入った商業施設の会社で5年間内装設計の仕事をしていたのですが、仕事が忙しくなかなか資格の勉強が出来なかったんです。
仕事をしながらは本当に難しいですよね。
そんな中、ホロラボへの入社を決めて、とても前向きな決断だった反面、建設業を離れることに少し後ろめたさがありました。大学も建築学科を卒業したのに結局資格も取らないまま業界を離れたらもったいないなと思いまして。そこで、せめて証明できる物をと思い、二級建築士の勉強を始めました。
仕事の証明は確かに難しいので、資格を取っておけば一つの強みになります。
ホロラボで働きながらの勉強方法をお聞きしたいです!
資格学校へ週一回通うために9月の二次試験終了までは業務委託という形で働いていました。業務時間を9時-17時として、だいたい8時から1時間は構造の計算問題。これがかなり頭が冴えて良かったです。17時に終業した後は20時くらいまで集中して勉強時間を確保していました。
ホロラボは完全リモートなので通勤時間がないこともメリットですね 。
そうなんです。終業時間の1分後には勉強にシフトチェンジできるのがリモートの良いところで、はじめは勉強で机に向かうことなんて本当に久しぶりでかなり辛かったのですが、仕事の集中力のまま向かうことが出来たので上手く継続でしました。おかげさまでリフレッシュの時間も他の受験生に比べたらかなり取っていた方だと思います(笑)
小池さんはどんなワークスタイルなの?
ホロラボはフルリモートで通信環境とパソコンとiPad / HoLolens 2があればどこでも仕事出来る環境なので、入社をきっかけに実家へ帰ってきました。初めのころは学生時代に使っていた勉強机で仕事していたのですが腰を痛めてしまったのでデスクとチェアを一新しました。デスクは昇降式の物を購入し、立ったり座ったり同じ姿勢で長時間過ごさないように工夫しています。チェアは背もたれのないバランスチェアを購入しました。基本的には仕事中は立って、勉強中は座るという姿勢でやっていました。
立ちながらなんて健康にも良さそうです…。
二次試験の設計製図になってからは座って作図をするのが難しく、ずっと立って行っていたので椅子の出番はあまりなかったですが、昇降式デスクは今年買って良かったものNo.1です!試験が終わった今も仕事中は基本立ち姿勢で行っています
どうしても家だと色んな誘惑があってだらけてしまうので、慣れるまではかなり集中力を持続するのが難しかったです。起床してから必ずストレッチをして体を温め、朝食後はほぼ座らないようにしています。立った状態でデスクに向かうと、もう仕事するしかないので集中力が保てます。
確かにそうかもしれないですね…仕事するしかない環境作りが大事かもしれません。
あとはチームの文化として、9時の朝会後も基本的には音声通信をつなぎっぱなしにしているので、孤独感もなく私もやらなきゃ!となります。顔の見えない状態でのリモートのお仕事はコミュニケーションがとても重要だと感じていて、チャットツールで細かいことでもすぐ書き込んでみたり、チームでも雑談の時間を多く取るように心掛けたりしています。週一回チーム内でネガティブとポジティブを共有しあうレトロスペクティブの時間は非常に有意義な時間だなと感じています。
雑談時間、今年はもっと増やしたいですね!時間とりましょう(笑)
今年の5月にホロラボ内で保護猫の募集があり、2匹わが家へお迎えしました。先住猫もいたので今は3匹一緒に暮らしています。仕事中もデスクのすぐそばで寝ていたり、かなり癒されています。
会議中のネコチャンの声にこちらも癒されています。

また、平日はフルリモートでほとんど家にいるので、休日はなるべく外出するようにしていました。建築やアートが好きなので、街に出て散歩したり美術館へ行ったり。最近はコロナ禍も落ち着いてイベントも沢山開催されるようになってきたので、先日2年ぶりにコンサートへも行きました!世の中が落ち着いてきたらフルリモートの利点を活かしてワーケーション等もできたらいいなと思っています。
自分の軸があり、指示されなくても自分から課題を見つけ、解決できる人だと思います。良くも悪くもホロラボ内には役職や上下関係がありません。ましてやフルリモートでさらに住んでいる場所もバラバラ。そのため、かなり個人の意思に委ねられた職場環境だと思います。さらに、日々変化する最先端の技術を取り扱っているため、正直誰かからの指示を待っていたら何もできないと思います。
確かに、仕事がSlackでいきなり飛んでくることも多いですし、スケジュール管理も大事ですね。自分がやります!という気持ちが大事なですね。
建設業界の発展に携わりたいという思いでホロラボに入ったのですが、最近は建設業に留まらず様々なお客様との接点が増えてきたので、ものづくりをしているすべての人へAR/VR/MR技術で発展していってほしいなと思うようになりました。そのためにも、mixpaceを沢山の方にご利用いただきたいし、サポートを通じて色んな知見を深めていきたいと思っています。またせっかく資格を取ったので、それがお客様の信頼に繋がったら嬉しいなと思っています。アプリのサポートに限らず、受託案件などより現場に近い立場でお客様と一緒に課題解決をしていけたらいいなと考えています。
大学で建築を学び、内装設計のお仕事からBIMに出会い、ホロラボにjoinした小池さん!仕事をしながら二級建築士を取得したバイタリティに加え、しっかりした発言力と業務遂行力からチームにかかせない存在です。
ホロラボでは各々社員が工夫してフルリモート、スーパーフレックスの中でも仕事とプライベートにメリハリをつけて生活しています。 今度また色々な社員のインタビューを載せていく予定です。
小池さん、第1回目のインタビューありがとうございました!
]]>2020年のふりかえりはこちら
会社設立からなんと5年が経ちました。
2021年は3月のMicrosoft Mesh、10月のFacebookからMetaへの社名変更、11月のMicrosfot Ignite でのメタバースの話が大きな話題でしょうか。。
Microsfot MeshやMicrosoftのメタバースについては下記に記録が残っていますので、ぜひご覧ください。
アウトプットは会社視点、業界視点が多いのですが、手を動かすことも多く、客先に行って現場調整やデモからの3DスキャンからのVPSデモはよくやりました。
会社のほうにも書きましたが、この半年は個人的に手ごたえがあり、向こう半年、1年でそれを実証できればと思います。
2022年はどこまでいけるか楽しみでもあるので、来年のふりかえりで良い成果をかけるようにできればと思います。
]]>会社設立からなんと5年が経ちました。
今年も無事に終えることができました。お客さん、社員のみなさん、関わってくれた皆さんに感謝です。
PR的な内容はこちらから。
スライドはこちら
2020年、2019年のふりかえりはこちら

2021年もコロナ禍のため、なかなか現場へ行くことができないながらも、昨年と比べても数多くのアウトプットが出せました。
会社外も含めた大きな流れとしては、3月のMicrosoft Meshや10月のFacebookからMetaへの社名変更、11月のMicrosfot Ignite でのメタバースの話でしょうか。
Microsfot MeshやMicrosoftのメタバースについては下記に記録が残っていますので、ぜひご覧ください。
業務面では、この半年で自分の中での手ごたえが出てきており、向こう半年、一年で成果として出していければと思います。とはいえ、会社運営上の売上、利益についてはまだまだ課題もあり、この改善をしつつ攻勢で進めていければと考えています。

メンバーもいままでで一番多くの方に入社いただき、フルリモートの体制に移行したこともあり全国各地にメンバーがいます。


4月の「April Dream 4月1日は、夢の日。」に参加し、「遊びにも、仕事にも、勉強にも…あなたの日常にMixed Realityが溶け込んでいる。そんな世界を創る、自由でつよつよな会社です。」という夢を出しています。夢ではありますが、実現可能な世界だと感じていて、時間はまだかかると思いますが徐々にこの世界に近づけていけるように取り組みを進めていきます。

業務としては、株式会社大林組、株式会社ドコモ・森ビル株式会社との取り組みの影響が大きく、エンタープライズ向け、コンシューマー向けともに実運用に向けて進めています。

自社サービスのmixpaceではAutodesk BIM 360およびAzure Remote Renderingの連携を実装し、BIMを使用したワークフローの中にmixpaceが入る、そこで利用される大容量ファイルのHoloLens活用ができるようになりました。

また、toMap連携では、現場でのARデバイスのとは別に、俯瞰した環境での3Dデータ活用を進めています。

2021年は広域AR、大容量データ連携、現場と俯瞰の連携など、パーツがそろってきた印象です。
利用シナリオについてもいくつか有効なケースが見えてきたので、2022年はそれを検証すべく取り組みを進めていきます。
]]>ホロのPさん(Yusuke Saito Ph.D)です。 今年も一年、徐々にアウトプットを出せているような気がしています。良いこと。 自分の時間も作れています。良いこと。 ダイエットは諦めています。悪いことw
というわけで、もう少し具体的に振り返ろうかなと思います。
今年はエンジニアとして、またR&Dでリサーチャとして、兼任で動きました。
エンジニアとして一番大きかったのは、とあるプロジェクトの見直し(設計、開発、自動テストの記述)を行い、 また関連アプリケーション(PC)を追加でリリースしたことです。特に設計面、Model層をちゃんと切り分けて共通化・モジュール化して使いまわせるような形で作り、HoloLensアプリでも、PCアプリでもほぼ同じコードで動くようにできたのはよかったかな、と感じています。
ただ反省面もあって、引継プロジェクトの負債部分を甘く見ていて、結果的に作業量の見積もり精度が低かったのは反省点ですね。
一年を通して、主に空間位置合わせの研究をして、たまに機械学習の記事を書いて、といったような形でしょうか。
空間位置合わせの研究として、アウトプットを出せたのはよかったかなと思います。 ただ、欲を言えば、現場で使えるレベルまで昇華させていきたい、というのが本音であり、今後の目標でもあります。 blog.hololab.co.jp
また、上記内容をVirtual学会で発表できたことも良かったこととして挙げられます。 sites.google.com Virtual空間上で学会を行う、というとても興味深い試みをされており、またそこで発表できたのはとても貴重な経験になりました。今後も学術面でのアウトプットも出していきたいなと考えています。
一年を通して、徐々にではありますが、アウトプットを出せているのは良いことだと思います。来年は、さらにアウトプットに質と量を上げていく、ただあせらずに、というスタンスでやっていこうかなと考えています。 駄文ではありますが、ここまで読んでいただきありがとうございました。 来年もよろしくお願いします。
]]>主に人、組織、技術の実装あたりです。
最近はHoloLensの土台としてのDXの必要性を感じているのですが、DXは実際には組織論だと考えていて、自分の組織含めて組織の考え方について触れるようにしています。
元々本を読むのは得意ではなかったのですが、Kindleで流し読みを覚えたので、それなりに読めるようになりました。
先日、社内でも自分の考え方として紹介したので、オープンな場でも残しておこうと思います。

いままさにHoloLensで未来を実装している最中なので。
電気の社会実装がおもしろかった。
インパクト、アウトカムの考え方について学ぶ。
")
「未来を実装する」と一緒に言及されるみたいなので購入。
CX(コーポレート・トランスフォーメーション)、IX(インダストリアル・トランスフォーメーション)あたりに共感。
ここから「両利きの経営」、「(Netflixの)NO RULES」が言及されている。
『DXの思考法』と『未来を実装する』を並べて言及されることが今日2回もあって、なるほどなぁと思いました。https://t.co/xdiJV1qjhy
— Taka Umada 🐴 馬田隆明 (@tumada) 2021年5月14日

DXのこの絵のあたりを読みたかったんだけど、ついおもしろくて一通り読んでしまった。

組織作り、ソフトウェアエンジニアのキャリアパスについて参考になった。
自分が考えていることと近いので、参考にしつつ、会社に適用する。

管理ゼロで成果はあがる~「見直す・なくす・やめる」で組織を変えよう
管理したくないので。
あと、自分の組織の考え方は、勝手に倉貫さんに影響を受けてる。
")
読んでなかったので。
そういえば、Mixed Reality は AI、量子コンピューターと並んでMicrosoftの次の投資分野だった。

かわぐちさんに教えてもらって。
常に成長できる意識をもってもらいたい。

ユニコーン企業のひみつ ―Spotifyで学んだソフトウェアづくりと働き方
アジャイルサムライのJonathanさんの本。角谷さんの訳。
組織の在り方、文化の醸成など。
ここから「米海軍で屈指の潜水艦艦長による「最強組織」の作り方」と「モチベーション3.0」が言及されている。

「命じる」から「委ねる」へ。
リーダシップのモデルは確実に変わっていて、それは海軍でも同じ。
")
モチベーション3.0 持続する「やる気!」をいかに引き出すか (講談社+α文庫)
「仕事」を「遊び」に変える
モチベーション3.0の要素 = 自律性 + 熟達 + 目的
会社としては内発的動機付け(「永久内燃機関」と呼んでる)で技術に取り組むことをよしとしている。

ティール組織 ― マネジメントの常識を覆す次世代型組織の出現
会社をヒエラルキーにするつもりはないので、近いのはティール組織だよねってことで。

自分の仕事の考え方、組織の考え方はScrumから来てる。
RSGT 2021の動画などを見てて野中先生の本をいろいろ読んでみた。
ちょうど「ワイズカンパニー」を読み終えたあとだったので、わかりやすかった。

野中先生の最近の本。
SECIモデルは社内やお客さんへの説明でも活用。暗黙知と形式知の話はシナリオによっては顧客課題の本質。
「コネクティング・ドッツ」はこれでその言葉を知った。

アメリカのDXって話で「デザイン思考入門」は馴染みがなかったので。
お客さんとやりたい。

自分が「あれもこれも」な性格で、それを「二項動態」という言葉で定義してるので、それでもいい裏付けとして。

ホロラボの強みは、この知的機動力が高い(新しい技術をすぐに取り込む)こと。
OODAループは海軍の個人判断の考え方、SECIモデルは組織の知的創造プロセス。
バイブル的な。
この知識と(少しの)実体験で、だいぶ考え方が変わった。

どこかで見つけた。
ホロラボの仕事はお客さんの希望を実装することなので、お客さん(ユーザー)に寄り添う組織、意識になることが大切だと考えている(もちろん、社内で関わる人も大切というのは前提)
 世界一「自由」な会社、NETFLIX (日本経済新聞出版)")
NO RULES(ノー・ルールズ) 世界一「自由」な会社、NETFLIX (日本経済新聞出版)
これから読む。
自社に対する考え方はNetflixが近いかも。

なんで買ったかは忘れたけど、積んである。

「学習する組織」入門 ― 自分・チーム・会社が変わる 持続的成長の技術と実践
社内でオススメされた(それで「学習する組織」を買ってたことを思い出した)
![LeanとDevOpsの科学[Accelerate] テクノロジーの戦略的活用が組織変革を加速する impress top gearシリーズ](https://m.media-amazon.com/images/I/51TuqLnPBCL._SL500_.jpg "LeanとDevOpsの科学[Accelerate] テクノロジーの戦略的活用が組織変革を加速する impress top gearシリーズ")
LeanとDevOpsの科学[Accelerate] テクノロジーの戦略的活用が組織変革を加速する impress top gearシリーズ
読まないとと思いつつ、読んでない。
]]>昨年7月にHoloLensMeetupで発表した手の動作認識では、機械学習のライブラリとしてOpenCVForUnityを用いていました。 画像処理の機能が使える反面、OpenCVForuUnityを使用する場合だとライセンス料がかかってしまう、という欠点があります。
そこで、HoloLens2でWindows.AI.MachineLearningを使って手の動作認識をしてみました。 UWP標準の機能を用いることで、特別にライセンス料などのコストをかけることがなく機械学習を用いることができます。
コードはGithubに上げてあります。 ポイントをいくつか挙げて解説していきます。
https://docs.microsoft.com/ja-jp/windows/ai/
Microsoft公式のWindowsアプリに機械学習を実装を行うことができます。UWPアプリにも対応しています。
モデルファイルは下記を参考にしてください stopengin0012.hatenablog.com
アップしたコード上では、HoloLens実機のピクチャフォルダ以下を参照するようにしています。
private string dirName = "HandGestureModel"; private string fileName = "handgesture_v001.onnx"; private async Task LoadModelAsync() { #if WINDOWS_UWP var dir = await KnownFolders.PicturesLibrary.GetFolderAsync(dirName); var file = await dir.GetFileAsync(fileName); // モデルのロード handGestureModelGen = await HandGestureModel.CreateFromStreamAsync(file as IRandomAccessStreamReference); if (handGestureModelGen == null) { Debug.LogError("モデルデータの読み込みに失敗しました. "); } #endif }
したがって、下記図に示すように、ビルド時にCapabilityを設定してあげる必要があります。

また、(結構忘れそうな事項として)onnx拡張子のファイルへの参照を有効にします。 下記の図のように、サポートされるファイルの種類に「.onnx」を指定してください。

基本的には、先日の記事で実行確認した時と同じです。 入力を合わせることに注意してください。
... (using参照) #if WINDOWS_UWP using Windows.AI.MachineLearning; using Windows.Storage; using Windows.Storage.Streams; #endif ... private async Task<string> RecognizeGesture() { #if WINDOWS_UWP ... float[] data = ReadToFloatArray(handJointController.handGestureData); handGestureInput.Input120 = TensorFloat.CreateFromArray(new long[] { 1, columns * frameCount }, data); //Evaluate the model var handGestureOutput = await handGestureModelGen.EvaluateAsync(handGestureInput); IList<string> stringList = handGestureOutput.label.GetAsVectorView().ToList(); //Debug.Log($"判定された動作ラベル:{stringList[0]}"); //IL2CPP 確認用 var label = stringList[0]; return label; #endif }
HoloLens2でWindows.AI.MachineLearningを使って手の動作認識を実装しました。 その上で気をつけるポイントをいくつかまとめました。
昨年7月のスライドです
www.slideshare.net]]>
sklearnで作成したRansomForestモデルをONNXファイルに変換し、Windows Machine Learningで利用する際に気を付けることを書いていきます。
サンプルに、HoloLens2取得したHandGestureを分類するコードをGithubに挙げました。 github.com
Windows Machine LearningのUWPアプリでONNXモデルを利用する際、どうやらモデルに型不明な経路(?)があると、ロードに失敗します。

これを防ぐために、convert_sklearn関数でinitial_typesやfinal_typesを指定します。 ここでfinal_types指定の際、zipmap出力の型(map(string,tensor(float))の指定方法がわからず、方法を模索していたところ、zipmap変換をしない方法にたどり着きました。
options = {id(pipeline): {'zipmap': False}}
上記のoptionsをconvert_sklearnの引数に指定します。
from skl2onnx import convert_sklearn
from winmltools.convert.common.data_types import FloatTensorType, StringTensorType, Int64TensorType
options = {id(pipeline): {'zipmap': False}}
rf_onnx = convert_sklearn(pipeline,
target_opset=7,
options=options,
name = 'RandomForestClassifier',
initial_types=[('input', FloatTensorType([1, 120]))],
)
出力されたONNXモデルは以下のようになります。

ONNXのバージョンに気をつける必要はありますが、とりあえずwinmltoolsのコンバータを使用せず、最新のskl2onnxを使うことができました。
from skl2onnx import convert_sklearn
当然といえば当然ですが、入力・出力の型を合わせる必要があります。skleanrからのコンバート時にinitial_typesを指定するなども、その一環として行っています。
...
# データ入力時
handGestureInput input = new handGestureInput();
input.Input120 = TensorFloat.CreateFromArray(new long[] { 1 , 120 }, feature);
...
public sealed class handGestureInput
{
public TensorFloat Input120;
}
TensorString型の取り出しには、一癖あるなぁと感じます。 取り出し方としては、TensorString.GetAsVectorView().ToList()で、string型のListに変換し、その要素を取り出します。
//Evaluate the model
var handGestureOutput = await handGestureModelGen.EvaluateAsync(input);
IList<string> stringList = handGestureOutput.label.GetAsVectorView().ToList();
Debug.WriteLine($"判定された動作ラベル:{stringList[0]}");
sklearnで作成したRansomForestモデルをONNXファイルに変換し、Windows Machine Learningで利用する際に気を付けることを書きました。 (HoloLens2上で実行できたらいいな....)
]]>会社のふりかえりはこちら。
今年は肩書がふえました。「XR コンソーシアム理事」と「Microsoft Reginal Director」の2つです。
自分のできること、得意なことを考えると、こういう活動ができるのがいいのかなと思っています。
会社としてもMixed Reality Partner ProgramでGoldの認定をいただけたので、業界的にそういう立ち位置で見られるんだということで、それに見合った動き方ができるようには心がけています。
執筆としては「HoloLens 2入門」を出版しました。
開発ではなく利用に向けた本で、いまの状況から見ても本はこちら側でよかったと思っています。開発については変化が早いこと、公式ドキュメントが充実していることからなかなか悩ましいところです。継続的なアップロードができる環境であれば。という感じでしょうか。
登壇はHoloLens以外のところを意識的に増やしました。
HoloLensに関しては立場的なところで出ることが多くなりました。それ以外のところは必要な時だけ出るようにしています。
開発プロセスとしてRSGT2020から始まり、Agile Fest Osaka、Agile Tech EXPOと年間通して関わることができました。この一年でやっと自分の中で腹落ちしてきた感があります。
ほかにPower Platformに注力しています。ここで作ったベースは引き続き取り組んでおり、一部はテストながらもお客さん環境でも稼働するようになりました。
この辺りはXR Kaigiの講演動画を見てもらえるといいのかなと思います。
だいぶ総力戦感が出てきて、まぁ大変って感じはありますが、それはそれで楽しいのでまぁいいかなという感じです。
コロナ禍で会社をフルリモートにしたので開発時間が増えたのがうれしいところです。
簡単にいうと、HoloLens2に内蔵されているセンサー類のストリームデータを可視化・保存できるモードのことです。 もちろん、研究用途のためなので、動作保証とかないです。(なので、お仕事で使う場合は気をつけてください) また、Preview版なので、変更される可能性が高いです。 詳しくは、下記ドキュメントをご覧になってください。 docs.microsoft.com
ドキュメント通りやれば大丈夫なはず。 OSのversionが19041.1356 以降となってれば使えるはずです。 また、デバイスポータルでReserchmodeを有効にすることを忘れずに。
公式にサンプルコードが公開されています. https://github.com/microsoft/HoloLens2ForCV
本記事では、Samples/StreamRecorder以下を参照します。 ここには、記録するためのプロジェクト(C++)と、保存したデータをロードするコード類(Python)が入っています - StreamRecorderApp : 記録するためのプロジェクト(C++) - StreamRecorderConverter : 保存したデータをロードするコード類(Python)
まず、ソリューションファイルStreamRecorderApp/StreamRecorder.sln を開きます。
(20200912時点)現在のコードだと、RGBカメラの情報やEyeTrackingの情報を記録するモードになっていません。 これを有効にするために、以下の手順を踏んでください。
AppMain.cppファイルのコードを少し変えます。 //Set streams to capture となっている部分に以下を追記(20200912時点)してください。
std::vector<ResearchModeSensorType> AppMain::kEnabledRMStreamTypes = { ResearchModeSensorType::DEPTH_LONG_THROW };
std::vector<StreamTypes> AppMain::kEnabledStreamTypes = { StreamTypes::PV , StreamTypes::EYE };
Debugビルド、ARM64で実行すると、Start・Stopボタンが表示されます。 Start押し、適当な時間の後Stopを押して記録が完了するのを待ちます。 記録が完了すると、以下の図ようにHandの位置などが可視化された状態になります。

仮想環境を作成し、python3, numpy, opencv-python. open3dをインストールしてください。 この辺は省略します。
python StreamRecorderConverter/recorder_console.py --workspace_path <output_folder> --dev_portal_username <user> --dev_portal_password <password>
すると、下記のようなコンソール画面になります。download_allを入力してEnterを押すと、実機からダウンロードされます。

データには、HandやGazeのデータがCSV形式になっていたり、またCameraパラメータなどもあるようです。
下記コマンドで、ダウンロードしたデータを、いくつかのスクリプトで読み込める形にできます。 - <path_to_capture_folder> : 実機からダウンロードしたフォルダのパスを指定してください("2020-09-11-175712"のように日付の形式になっているフォルダです)
python process_all.py --recording_path <path_to_capture_folder>
python convert_images.py --recording_path <path_to_capture_folder>

python project_hand_eye_to_pv.py --recording_path <path_to_capture_folder>
青がGaze, 緑がHandかな??

python tsdf-integration.py --pinhole_path <path_to_pinhole_projected_camera>
tsdf-mesh.plyが作成されます.

HoloLensで取得した温度情報をAzure IoT Hubに入れて、Stream Analytics経由でPower BIに出力できた。
— 中村 薫 (@kaorun55) 2020年8月9日
↓これをなぞってみた。https://t.co/nMLapJfauC pic.twitter.com/LVzFJE1ELC
温度センサーはOmron 2JCIE-BU01。このデータをアドバタイズパケットでHoloLens 2で取得、HoloLens 2からAzure IoT Hubにデータを送信しています。Azure IoT HubからはStream Analytics経由でPower BIに入れています。
元のドキュメントはこちら。
ここではHoloLens 2にUSBで接続していますが、アドバタイズパケットで取得しているためセンサーの電源取得のみです。またアドバタイズパケットのため接続不要でデータを取り込んでいます。

[Tokyo HoloLens ミートアップ vol.21] ホロラボでのアプリ開発技術
Unity で HoloLens (UWP) アプリを作る際のパッケージ名をプロダクト名に変更するスクリプト - たるこすの日記
https://mplus-fonts.osdn.jp/about.html
https://github.com/webrtc-uwp/webrtc-uwp-sdk
https://github.com/microsoft/MixedReality-WebRTC
https://github.com/microsoft/MixedReality-WebRTC/releases/tag/v1.0.3
https://github.com/microsoft/MixedReality-WebRTC/releases
世界一わかりやすいClean Architecture - nuits.jp blog
Unity ライブラリを Git submodule で管理する - たるこすの日記
https://github.com/tarukosu/go-unity-cli
HoloLens 向け 2D ブラウザアプリ、HoloBrowser を公開しました - ブログ@HoloLabInc
https://github.com/HoloLabInc/XRLineRenderer/tree/hololab/for-hololens
https://github.com/HoloLabInc/XRLineRenderer/releases/tag/hololab-v1.0.0
https://github.com/microsoft/WindowsDevicePortalWrapper
https://github.com/HoloLabInc/HoloLensAppManager
Common Data Service とは何か? - Power Apps | Microsoft Docs
https://github.com/StefH/NETStandard.HttpListener
Unity で長期的なプロジェクトやライブラリを作成する際、 ソースコードが公開されている Unity ライブラリや社内ライブラリを使う場合に、 Git submodule でコードを取り入れるようにしています。
自分の Git リポジトリにライブラリのコードを入れることに比べて、以下のようなメリットがあります。
この記事では、自分がどのように Git submodule を使ってプロジェクトを構成しているかを紹介します。

リポジトリのルートフォルダの中の _external フォルダにライブラリのコードが入ります。
このままでは自分の Unity プロジェクトから使えないため、
Assets フォルダ内に必要なライブラリのフォルダへのシンボリックリンクを作成します。
シンボリックリンクをはるためのバッチファイルやツールをルートフォルダの中の _tools フォルダに格納します。
シンボリックリンクは go-symlink-creator という自作のツールを使って作成しています。
このツールを使えば、どこからどこにリンクをはるのかという定義を yaml ファイルで行えます。
プロジェクトをセットアップする際の手順を紹介します。
まずは、リポジトリのルートフォルダに _external, _tools フォルダを作成します。
_external フォルダへライブラリを追加_external フォルダには、Git submodule でライブラリをクローンします。
> git submodule add <repository>
利用するブランチやタグを変更する場合は、クローンしたフォルダ内で変更します。
_tools フォルダへシンボリックリンク作成ツールを追加Releases · HoloLabInc/go-symlink-creator · GitHub
上記ページから go-symlink-creator.exe をダウンロードし、_tools フォルダに保存します。
また、以下のような SymlinkSettings.yaml ファイルを作成し、_tools フォルダに保存します。
src はリンク先のファイル・フォルダの親フォルダ、dest はリンクを作成するフォルダ、target はリンクを作成するファイル・フォルダです。
symlinks: - src: \path\to\source\folder dest: \path\to\destination\folder target: - FolderA - FolderB include-meta-file: true # meta ファイルのリンクも作成する
最後に、クリックだけで実行できるようにバッチファイル (createSymlink.bat) を作成します。
@echo off cd /d %~dp0 call go-symlink-creator SymlinkSettings.yaml pause
このバッチファイルを実行することで、シンボリックが作成されます。
シンボリックリンクのファイルは Git の管理対象から外します。
.gitignore ファイルを作成し、シンボリックリンクのファイルを指定してください。
以上でプロジェクトのセットアップは完了です。
上記のセットアップを行ったプロジェクトをクローンする場合は、 リポジトリをクローンした後にサブモジュールのクローンを実行します。
> git clone <repository> > cd <repository> > git submodule init > git submodule update
その後、シンボリックリンクを作成するバッチファイルを実行します
> _tools\createSymlink.bat
HoloLens アプリ開発で利用される MRTK を、Git submodule で利用する手順を紹介します。
上記で紹介した手順の具体例となります。
まずは、リポジトリのルートフォルダに _external, _tools フォルダを作成します。
_external フォルダへ MRTK を追加_external フォルダで以下を実行します。
> git submodule add git@github.com:microsoft/MixedRealityToolkit-Unity.git
利用するバージョンを指定します。
例えば、MRTK v2.4.0 を使う場合は以下のようにします。
> cd MixedRealityToolkit-Unity > git checkout v2.4.0
_tools フォルダへシンボリックリンク作成ツールを追加go-symlink-creator.exe と createSymlink.bat については同じ内容のため省略します。
SymlinkSettings.yaml は以下のようになります。
symlinks: - create-dest-folder: true # dest フォルダ (Assets\MRTK) が存在しなければ作成する include-meta-file: true src: ..\_external\MixedRealityToolkit-Unity\Assets\MRTK dest: ..\Assets\MRTK target: - Core - Providers - SDK - Services - Tools - Extensions # Examples を利用しない場合は削除する - Examples
Assets フォルダに .gitignore ファイルを作成し、以下の内容を記入します。
/MRTK /MRTK.meta
以上、自分が普段行っている Unity ライブラリを Git submodule で管理する手順の紹介でした。
]]>これをこのまま使っていると複数のアプリケーションでパッケージ名が被ってしまい、 アプリケーションが上書きされて消えてしまう、インストールできない、といった問題が発生します。
手動での変更方法は以下のブログで紹介されています。
ここでは、この値を自動で変更するスクリプトを紹介します。
ホロラボでは、以下のスクリプトを HoloLabToolkit という社内向けのアプリ開発ライブラリに入れています。
(namespace などは一部変更しています)
このスクリプトは Unity Editor の起動時やビルドターゲット変更時に実行され、 Company Name やパッケージ名がデフォルトのままであるときに以下のように変更を行います。
Company Name : スクリプトで設定した値
パッケージ名: プロダクト名(Unity プロジェクトを新規作成するときのプロジェクト名)
社内ツールや個人の開発ツールに入れてご活用ください。
]]>
Microsoft MVPを再受賞しました。
今年はもう一つ増えて、 Microsoft Regional Director(RD) を拝命しました。
MVPが技術的なアウトプットやフィードバックに対して、RDはビジネス的なアプトプットやフィードバックを求められる位置になります。 RDもMVP同様に個人につくのですが、ビジネス的なので個人では無理で会社ありきと思ってます。
会社で認定されているMRPP(Mixed Reality Partner Program)と合わせて、個人と会社での、技術とビジネスのアウトプットについて、評価と期待をされていると認識してます。
まぁ肩書が増えてもやることは変わらないので、粛々とHoloLens 2の実運用に向けて進んでいきます。
]]>6/18発売です。

書籍の内容については会社ブログのほうにまとめたので、こちらは個人的なことを。
前提としては下記になります。
読者の対象は企業のユーザーさんを想定しているため、HoloLens 2の概要、事例、セットアップ、運用、アプリの使い方が中心です。アプリ開発に関する要素はありません。
2017年に日本でHoloLens 1がリリースされました。この時はなんとなく会社を作ったほうがいい雰囲気から会社を作って、どうなるかもよくわからない状況でした。2017年、2018年と徐々に方向性が見えてきたところでの2019年のHoloLens 1ディスコン。HoloLens 2が2019年の後半にでることだけが見えている状況で、HoloLens 1がうまく適用できるところからHoloLens 2への準備を着々としていました。
2019年の後半にHoloLens 2の販売が開始され、ユーザーが手に取る機会が増えました。HoloLens 2から始めて触れるユーザーも多くいて、それが今後も増えていくということから、書籍はユーザー向けとしました。本の賞味期限としても、HoloLens 2リリース後すぐであれば、仮にHoloLens 3がでるとしても数年は使うことができます。それまでにHoloLens 2のユーザーをできるかぎり増やすことが自分の仕事と考えています。
開発向けに関しては、書籍の初版が2000-3000部とすると、それだけのHoloLensアプリ開発者がいるかというとNoでしょうし、ユーザーが増えて様々使ってもらうことによって、ユーザーのやりたいことが増え、結果的に開発者が必要になってくる状況になるといいなと思っています。
また、開発者向けの場合、日ごと変わっていくUnityやMRTKに対して、どのような内容がいいのかというのが正直見えていません。昨今のように日々変わっていく状況では、物理的な書籍よりもWebや動画のほうがいいのかなとも思います。とはいえ、書籍のほうが広がり、認知度などの面でよいこともわかっているので、うまい方法があればやってみたいです。
今回は社内や宮浦さん、森さんにだいぶ叩いてもらいましたので、だいぶ読みやすいと思います。内容、構成などもだいぶ手入れをしてもらってるのですが、書いてるのは自分なのでそのあたりはご了承ください。
HoloLensが広まるにつれ、HoloLens外での要素が増えてきます。セットアップや運用、さまざまな用途など。薄く紹介のプロビジョニングパッケージ、MDM(Intune)。アプリからのDynamics 365、言葉だけの紹介になっていますがPower Platform。範囲がいつのまにか大きく広がっていて、それぞれを適切に使い分けながら、ユーザーに合わせた環境を作ることが大切になってきます。
いろいろと書き足りなかったところ、新しい情報などは会社のブログに追記していきます。前書きからリンク集にはアクセスできるようになっているので、そこをポータルにしようと思います。
]]>会社のふりかえりはこちら blog.hololab.co.jp
大体の発表が会社に紐づいているのでこちらに残すことが少ないのですが、 2019年は Microsoft de:code, Unite 2019, XR Kaigi, Microsoft Ignite Tour Tokyoといった大きなイベントで登壇することができました。
まぁ引き続きHoloLensなんですが、Azure Kinet が3月に日本でも発売開始になるので、こちらをぼちぼちまとめていこうかと思います。
HoloLens 2については、HoloLensというよりはMRTKで差分くらいなのでちょっとどうなんだろう(HoloLens 2用にまとめなおすのはアリかもしれないけど)
会社の方はだいぶお任せできるようになってきたので、2020年は開発の時間を増やしたいところです。結果的に2018年のふりかえりに書いてたオフロードはおおよそできている状態になったかなと。
2020年の目標としては、手を動かす時間を増やすことになります。また新しいものがたくさん出てくるので、それにちゃんとついていかないと。
イベントページはこちら
当日のまとめはこちら
ホロラボで5台調達できて色々触っていたのですが、Twitter見てると見てみたい、触ってみたい方が多かったので急遽開催してみました。
デザイニウムでも3台調達できたでので、7人の開発は1人1台+見学用に1台という、この時期で豪華な買いになりました。スタッフ含めてご協力いただいた方に感謝します。
Kinect v2までのゲームコントローラーからブランディングを変えたことで、いままでHoloLensを扱っていたお客さんも興味を持ってくれるようになりました。Kinect v2も最後のほうは産業用途が増えていたので、HoloLens 2と同様にいい場所に配置されたのではないかと思っています。
]]>
このエントリでは外部同期の手順について解説します。
ドキュメントはこちら
外部同期は複数台のAzure Kinect DKをオーディオケーブルで接続し、Depthのシャッターを同時に切ることができます。これによって複数台のAzure Kinect DKで同一タイムスタンプのDepth、IRのデータが生成されるので、同じタイミングでの空間スキャンができます。また、タイムスタンプが同一なので、それぞれのデータをクラウドにアップして後処理するなどの利用が考えられます。
ポイントは下記になります
なお、オーディオケーブルを接続する場所は付属のドライバでネジを外し、ケースを外すと出てきます(めんどくさい)。

Azure Kinect Viewerを使用しても外部同期を行うことができます。
デバイスを開き、ケーブルの状態を確認します。
Azure Kinect Viewerでの表示


起動してしばらくするとDepthのタイムスタンプが同じ値になります。

4台までの接続は確認しています。


スプリッタは2分岐でも5分岐でも動作しました。

ケーブル(5m/10m)

サンワサプライ オーディオケーブル 5.0m ブラック KM-A2-50K2
分岐

3.5mmオーディオ分配ケーブル 音声出力分岐コード イヤホンマイク機能搭載 ステレオミニY分岐ジャックコネクタケーブル 4極メス x 2-4極オス x 1 延長コード 多用型

Amazonベーシック 5ウェイ マルチヘッドホンオーディオスプリッター コネクター レッド
外部同期することでセンサーデータの同期の保証や後処理が可能になります。
ケーブルの取り回しが大変ですが、複数台のAzure Kinect DKを使う場合には導入を検討してみてください。
]]>Azure Kinect SDKをインストールすることで、開発に必要なファイルやビューアーツール、Azure Kinect DKデータのレコーダー、ファームウェアアップデートツールなどが利用可能になります。
公式のドキュメントはこちら
Azure Kinect のSensor SDKはこちらからダウンロードして、インストールします。
BodyTracking SDKはこちらから
Azure Kinect DKのプログラムを開発環境以外で動作させるときはSDKのインストールは不要で、実行ファイル(exe)と関連DLL(k4a.dll, depthengine_1_0.dll, k4arecord.dll)のみで動作します。
Azure Kinect DKはUVC(USB Video Class)という標準ドライバで動作し間に入るサービスもないため、センサーをUSB接続し、アプリ一式のみで実行可能となります。
デフォルトのビューアーです。最初の動作確認に使用します。

スタートメニューから「Azure Kinect Viewer」を検索するか、インストールフォルダ(通常は C:\Program Files\Azure Kinect SDK vX.Y.Z)のtools以下にある「k4aviewer.exe」を起動します。


通常は「Open Device」から該当のシリアル番号(複数接続されているときのAzure Kinect DKの識別子)を開きます。1つのAzure Kinect Viewerアプリでは1台のAzure Kinect DKのみ扱えるので、複数台のAzure Kinect DKを操作する場合には複数のAzure Kinect Viewerアプリを起動しOpenするAzure Kinect DKを変更します。
記録データの再生を行う場合には「Open Recording」に録画ファイル(拡張子 mkv)のパスを入力(ダイアログはないのでパスをコピペしますw)してmkvファイルを選択します。
Azure Kinect DKの動作を開始する前にデバイスの設定を行います。
基本的な設定としては、Depthのモード、カラーのフォーマットと解像度、フレームレートになります。

Depthのモードとモードによる見え方の違いは下記になります。


カラーのフォーマットと解像度は下記になります。 BGRAについてはMJPEGをSDKでデコードして作成しているようです。
フレームレートはDepthとカラーの最大値の小さい方に引きずられます。

「Color Control」を開くとカラーカメラの各種設定を変更できます。

外部同期の設定を行います(詳しくは後述)。同期ケーブルの接続はハード的に検出しておりSDKで取得ができます。




Azure Kinect DKの動作を開始すると、2Dでの画面が表示されます。IR、Depth、カラー、IMUとセンサー温度、マイクが取得できます。
3D表示に切り替えると点群で表示されます。

再生モードの場合は、自動で再生が開始され録画データのフォーマットが表示されます。

録画ツールです。コマンドラインアプリのため、コンソール画面やbatファイルで起動します。
ドキュメントはこちら
パラメーターは下記の通りです。

よく使うのはカラーモードの「-c」やDepthモードの「-d」あたりでしょうか。
例えば1080pのNFOV、Binnedは下記のようになります。
k4arecorder.exe -c 1080p -d NFOV_2X2BINNED -r 30 nfov_bined_1.mkv
1080pのWFOV、Unbinnedは下記のようになります。
k4arecorder.exe -c 1080p -d WFOV_UNBINNED -r 15 wfov_unbined_1.mkv
録画されたmkvはAzure Kinect Viewerで再生できます。
BodyTracking用のサンプルアプリです。BodyTracking SDKをインストールすると「C:\Program Files\Azure Kinect Body Tracking SDK\tools」にインストールされます。
k4abt_simple_3d_viewerはONNXを使用しているため、関連するCUDAのインストールが必要です。
インストールに関するドキュメントはこちらです。
CUDAは10.0固定となっており、インストールしてPCを再起動することで利用可能となります。CUDAをインストールする際に、GeForceのドライバのバージョンが下がる場合があるので、最新のドライバをインストールしなおします。
cuDNN はZIPでダウンロードするので、展開して「cudnn64_7.dll」にパスを通すかexeと同じ場所に置きます。
最後にVisual Studio 2015のRuntimeをインストールします(すでにインストール済みと出る場合にはそのまますすみます)。
この状態で実行すると動作し、下記のキーボード操作が可能になります。
下記の動画は「body visualization mode」と「3d window layout」を有効にした状態です。
うごいたーwwww pic.twitter.com/0GU3C1lKYU
— 中村 薫(Kaoru Nakamura) (@kaorun55) July 25, 2019
下記のようなエラーでしばらく動かなかったのですが、GeForceのドライバがエラーになっていたのでドライババージョンの問題だった可能性が高いです(今回はPCをリセットしてインストール手順を順に行いました)。

SDKをインストールすることでAzure Kinect DKの動作確認とデータの録画ができます。
録画することで、アプリ開発の際に再現性のある状態にできるので、現場データの録画は開発の最初に行うと良いかと思います。
]]>
米国と中国のみ。日本へは一度現地の住所に送って転送。電波は出してないので技適は対象外。
URLは「en-us」にすること。「ja-jp」はNotFoundになる。
SDKはオープンに開発されています。
動きがないので微妙だけどないよりはマシ
こちらご覧ください
Depth性能が素晴らしく良い。
とりあえず、動作確認 pic.twitter.com/OjQxXin0FL
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年7月8日
複数台のAzure Kinect DKのシャッタータイミングをハード的に同期させる機構。Azure Kinect DKは複数台運用も含めて設計されていることがわかる。
1 PCで4 KinectをExternal Syncで動かせたw pic.twitter.com/FhumU0EfQP
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年7月10日
OpenCV + PCL(Point Cloud Library) + 1 Kinect pic.twitter.com/Y0wMyRih2i
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年7月8日
外部同期はいったん置いておいてC#のプロジェクトを動かしてみた #AzureKinect pic.twitter.com/gqwkpxHI8U
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年7月8日
]]>C#でできればUnityに行ける pic.twitter.com/0c09eiSpnu
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年7月8日
呼んでいただいたみなさん、ありがとうございました。
今年はHoloLens 2とAzure Kinect DKが発売されるので、また楽しい一年になりそうです。ぜひ色々なところに広げていきたいので、ご連絡いただければと思います!
いまの受賞分野はWindows Developmentですが、昔はKinect for Windowsだった時期もありました。
一応会社ブログにはリンクだけまとめたんですが、個人的な思いというか考えてることは切り離した方がいいかなと思い、こちらにもまとめます。
第一回で「実際の導入を見据えた案件も少しずつ出始めています」としていますが、これはホロラボでの開発期間、契約期間からも実感しています。
2018年は長くても半年くらいのプロジェクトがいくつかでしたが、2019年は1年分の予算を確保していただき開発や調査にそれだけのコスト(時間、費用)をかける企業が増えてきました。プロジェクトはEnvisioning(導入) → PoC(概念実証) → Pilot(部分導入) →Deploy(実導入)と進んでいき、Pilot以降を見据えた取り組みが増えてきています。
去年あたりから、プロジェクト数の数字などを出すようにしています。これは外からあまり見えない実態みたいなものを出していきたいという気持ちがあります。HoloLensはいろいろなところで使われ始めています。とはいってもどのくらいの会社が使ってるの? どのくらいのプロジェクトが回ってるの?という数字が見えたほうがイメージしやすいのではと思っています。
例えば2018年の数字的なところはこちらです。2019年上半期もまとめてもらったので、どこかで出せるといいとは思ってるのですが、なかなか機会がなく。単純な数字でいうと、2019年半分で2018年一年分くらいにはなってます(プロジェクト数、売り上げなど)。
HoloLensの導入は手段であって目的ではありません。目的は業務の効率化であり、業務の効率化は線であって点ではありません。第二回で「自社の業務について「めちゃめちゃ考える」こと」と入れていますが、お客さん自身が自分たちの業務を考えること自体に意味があると感じています。実際にボトルネックはどこなのか?それはHoloLensでなければ解決できないのか?
MRPPのトレーニングで最初に言われたことは「Why? HoloLens?」でした。これは「なぜHoloLensでなければならないのか?」、「HoloLens以外の方法が最適ではないのか?」という問いに答えられるようにしなさいということです。これをお客さんとの会話の中で見つけ出さないといけません。なので、お客さんとの会話は大切で、もしHoloLens以外が最適であれば、HoloLens以外を選択するという提案をすることもあります。あくまでもぼくらの仕事はお客さんの業務の課題の解決なので。
業務課題の解決という意味では、点で見るとHoloLensが最適でも線で見るとHoloLens以外が最適なケースも往々にしてあります。ある業務ではHoloLensを使って改善ができるとしても、よくよくワークフローで話を聞くと、その前工程が実はボトルネックで、そこにはHoloLens以外の解決手段が適している場合があります。
なので仕様含めて丸投げされる場合は非常に厳しいですし効果も出にくいと考えています(これはHoloLensに限らないですが)。ぼくらは技術の提供はできますが、業務プロセスに関しては素人なので、そこはお客さん側でやってもらうこと。それをベースに技術的に解決することが自分たちの仕事と思っています。
とはいえ、多くのお客さんと話していると、課題は似ていたり、やりたいことが似ていることは多く、そういう共通項を見つけやすいことがお客さんと接している時間が長いことのメリットかなと思っています。
最近ちょっと考えてるのが、デジタルトランスフォーメーションだったり出社だったりというのは、技術ではなく文化(気持ち)の面が大きく作用するのかなと思っています。
たとえばデジタルトランスフォーメーションで紙をなくすといった場合に、いままで紙でやり取りしていたものが一切なくなるとして、それで業務が回るのか?という心配が変化を阻害するのではないかと思っています。
人間は変化を恐れるものなので、先に不安があると変化しない方を選択します。であれば、技術的な解決と並行して、心理的な不安を取り除くというなことも必要なんだろうなとぼんやり考えています。それをしないと表面上の導入に過ぎず、時間が経つともとに戻ってしまい、本当の意味での変革にはならないと思っています。
第三回にもありますが、個人的には今ビジネス向けVRをやりたいと思っています(諸々のリソースの関係でなかなか難しいのですが)。自分の中では昨今のスタンドアロンVRをVRとして見ていない節があり、HoloLensと同列に考えています。HoloLens、Mirage Solo、Oculus Go、Oculus Quest、それぞれ、性能、値段、機能によってメリット、デメリットがあり、それぞれ排他ではなく選択肢として考えると自分の中ではすっと入ってきたりします。HoloLens 2になり性能も似たようになったので性能的なひっかかりは少なくなると考えています。そういう意味ではWindows MR Immersiveのスタンドアロンが出てくれることを期待していたりします。
HoloLensは光学シースルーデバイスとして高性能ではありますが値段が高いことがとにかくネックになる。それに対してOculus Go、Oculus Questは10分の1程度に収まる。HoloLensでやっていることが必ずしもHoloLensでなくても良くてOculus Go、Oculus Questでも問題ない場合、単純にデバイス量で10倍は見込めます(ソフトウェアの費用は入れていませんが、そこは全体で調整すればいいのかなと思っています)。
第一回にある「米ウォルマートが従業員向けのVRトレーニングでOculus Goを17,000台購入」というのがありますが、ここまではいかなくてもまとまった台数の導入というのは非現実的なものではないかなと思っています。
]]>Unityアプリのソース管理ってどうしてますか?
— 中村 薫 (@kaorun55) 2019年1月30日
サブモジュール的な共通機能をどうやって管理してるのかわからん。
Unity プロジェクトを Git で管理している場合には、利用するモジュールは Git submodule を使って管理するというのが自然です。
しかし、Git submodule で利用したいリポジトリが通常の Unity プロジェクトの場合、 プロジェクトのルート直下は Assets, Packages, ProjectSettings などのフォルダになっているため、自分のプロジェクトの Assets 以下にそのまま入れられません。
例えば、MixedRealityToolkit-Unity だと以下のようなリポジトリ構成になっています。

自分の Unity プロジェクトの Assets フォルダに入れたいのは、MixedRealityToolkit-Unity の Assets 以下のフォルダです。

Git submodule で別のフォルダにクローンし、Assets 内にシンボリックリンクをはるという方法を使っています。
シンボリックリンク自体は Git の管理下に入れず、バッチファイルで作成しています。
はじめはシンボリックリンク自体も Git で管理しようとしたのですが、Git for Windows だとデフォルトではシンボリックリンクが有効にならないようなので、諦めました。
上記プロジェクトでは、Git Submodule で External フォルダに MixedRealityToolkit-Unity を入れています。
クローンした後、以下のバッチファイルを実行し、External 内のフォルダからプロジェクトの Assets フォルダ内へのシンボリックリンクをはります。
@echo off setlocal ENABLEDELAYEDEXPANSION cd /d %~dp0 set FOLDER_1=MixedRealityToolkit set FOLDER_2=MixedRealityToolkit.SDK set FOLDER_3=MixedRealityToolkit.Services set FOLDER_4=MixedRealityToolkit.Providers set FOLDER_5=MixedRealityToolkit.Examples set FOLDER_6=MixedRealityToolkit.Extensions set FOLDER_7=MixedRealityToolkit.Tools set i=1 :BEGIN call set f=%%FOLDER_!i!%% if defined f ( rem echo Create symbolic link !f! mklink /D ..\Assets\!f! ..\External\MixedRealityToolkit-Unity\Assets\!f! mklink ..\Assets\!f!.meta ..\External\MixedRealityToolkit-Unity\Assets\!f!.meta set /A i+=1 goto :BEGIN ) pause
また、.gitignore にシンボリックリンクのファイルを追記しておきます。
/Assets/MixedRealityToolkit /Assets/MixedRealityToolkit.meta /Assets/MixedRealityToolkit.Generated /Assets/MixedRealityToolkit.Generated.meta /Assets/MixedRealityToolkit.Examples /Assets/MixedRealityToolkit.Examples.meta /Assets/MixedRealityToolkit.Extensions /Assets/MixedRealityToolkit.Extensions.meta /Assets/MixedRealityToolkit.Providers /Assets/MixedRealityToolkit.Providers.meta /Assets/MixedRealityToolkit.SDK /Assets/MixedRealityToolkit.SDK.meta /Assets/MixedRealityToolkit.Services /Assets/MixedRealityToolkit.Services.meta /Assets/MixedRealityToolkit.Tools /Assets/MixedRealityToolkit.Tools.meta
バッチファイルをリポジトリに入れているので、クローン時の操作は以下のような手順になります。
> git clone git@github.com:HoloLabInc/LeapMotionInputForMRTK.git --recursive > LeapMotionInputForMRTK\External\createSymlink.bat
前本さんのブログでは、指定したフォルダだけをクローンするように Git submodule の設定をするという方法が紹介されています。
こちらも参考にしてみてください。
こんにちは、たるこすです。
LeapMotionInputForMRTK という、HoloLens(第一世代)と Leap Motion を使って HoloLens 2 のハンドインプットのシミュレーションができるものを作りました。
これにより、HoloLens 2 が無くても、HoloLens 2 のハンドトラッキングを利用したアプリの動作確認をすることができます。
コード、そして Leap Motion を HoloLens に取り付けるマウンタの3Dモデルは GitHub で公開しています。

2019年4月に MixedRealityToolkit-Unity (以下、MRTK) v2 RC1 が公開されました。
MRTK v2 は HoloLens 2 を含む、いくつかのデバイスをサポートしています。
MRTK v1 は HoloLens(第一世代)用のツールキットで、Head Gaze (頭の向き)がカーソルとなる入力方式でした。 MRTK v2 は、HoloLens 2 のハンド入力をサポートしているので、指先でボタンを押したり、手でものをつかんだりする UI が用意されています。
MRTK v2 の勉強を始めようと思ったのですが、2019年6月時点ではまだ HoloLens 2 を手に入れることができません。
HoloLens 2 がないと、ハンド入力の挙動確認がかなり難しいです。
(Unity Editor でマウスやキー入力でシミュレートすることは一応可能です)
そこで、HoloLens + Leap Motion でハンド入力の挙動確認をするために作りました。
アプリケーションは Unity Editor 上で実行し、Holographic Remoting を使って HoloLens で表示しています。
MRTK v2 の概要については、@Ash_Yin の資料が詳しいです。
この資料の P.37 で説明されている、MRTK.Providers 部分を拡張し、Leap Motion 用のスクリプトを追加しました。
詳しくは、コードを読んでいただくのがいいと思います。 github.com
自分は HoloLens で利用することしか考えていなかったのですが、de:code 2019 の Unity Technologies さんのブースで、 WinMR Immersive Headset + Leap Motion で LeapMotionInputForMRTK を使うデモが展示されていました!
twitter.comEXPOのUnityさんブースで@tarukosu さんのハンドジェスチャー体験しました。良かったです(*´ω`*) pic.twitter.com/NJA7KzNfWF
— だん (@arcsin16) 2019年5月29日
体験したところ、視野角が広く映像がキレイで、現実は見えないですが表示する映像としては HoloLens 2 により近い見た目でした。
HoloLens + Leap Motion の場合は、Holographic Remoting を使うためにどうしても見た目の質が下がってしまいます。
HoloLens 2 が待ちきれない! という方はぜひお試しください
]]>2019年4月24日に、Intel RealSense Japan Meetup が開催されました!
私は20分間の発表時間をいただいて、「現実世界コンピューティング RealSenseとロボットとHoloLens」というタイトルで話をしました。
簡単に言うと、Roomba や WHILL に RealSense T265 と D435i をくっつけて、自律移動できるようにしたという内容です。
さらに、移動の目標地点を HoloLens で設定することができます。
会場に WHILL を持ち込み、実機デモも行いました。無事動いてよかったです。
たるこす( @tarukosu )さんによる、現実世界コンピューティング。 realsense x ホロレンズ x #WHIILL 。なにこの未来。 #RealSense #TMCN #パーソルPT pic.twitter.com/XsRE6TusDn
— Seiya Shimizu (@Seiya_S) April 24, 2019
スライド中にもリンクを載せているデモ動画です。
RealSense T265 は2つの魚眼カメラとIMUで自己位置を認識できるデバイスなのですが、非常に使いやすかったです。
今回は、ロボットの位置を T265 でとれる値をそのまま信じて使いました。
ロボット自体のホイールオドメトリも利用していません。
より正確に自己位置を認識したい場合は、T265 の位置データと、別の Lidar などのセンサデータを使って SLAM するのが良い気がします。
第二回 Intel RealSense Japan Meetup も予定されているので、興味があるかたは是非ご参加ください!
]]>
ちょうど公開されたようです。
良くも悪くも今まで通り。Intel RealSense D435に近い印象。 現状ではCのSDKしかないので差別要因も不明。C#のSDKが出たらCognitiveとの連携などは簡単にできるようになるはず(ただ、それはRealSenseでもできるので、決定的な差別化要因にはならないと思う)。
単体であればIntel RealSense D435、複数台であれば日立LGのToFセンサーとの比較が必要になると思う。
セットされていた環境はUSB-C to Aのデータケーブルと、USBの電源ケーブルでした。USB-Cでバスパワーできないものどうなんだろう?と思ったので、HoloLens 2のUSB-Cケーブルを拝借してKinectに接続してみたところ、USB-Cケーブル1本のみで接続できました。
Azure Kinect DKの全体観についてはこちらでまとめていますので合わせてどうぞ。
]]>
今回、MRCなど画面の投稿は禁止されているので、見た目については想像にて補完ください。
確かにかぶりやすい。 フリップアップもじゃまにならず、そのままコードを書いているとつけてることを忘れるほど。ただ、前に出っ張るので、壁とかにあてそう。動く機構がついたので、全体的にはHoloLens 1よりも扱いに気を付けないといけない気がします。


ここから
この #HoloLens 2 ハンズオンをやる前の「準備編」はこちらです。
— Madoka 🇺🇸4/27-5/8(水)米国なう (@chomado) 2019年4月29日
ー
Install the toolshttps://t.co/rImJFhjQuP
ー
とくに MRTK のバージョンや Unity のバージョン、また「Windows 10 SDK 10.0.18362.0 or later」ってのが重要
ついに! #HoloLens 2 の公式ハンズオン資料が公開されました!
— Madoka 🇺🇸4/27-5/8(水)米国なう (@chomado) 2019年4月29日
実機が無くてもエミュレータで開発ができます。
第1話:HoloLens 2 ハローワールドhttps://t.co/lNZ8NjG1rD
第2話:UI, ハンドトラッキング, 新しいMRTK構成https://t.co/jdRvijRC2p
第3話以降も(PC閲覧時)左のメニューから辿れます
開発環境はこちらを参照してください。 前提として、CPUが変わったのでアプリはARMまたはARM64でビルドしないと動作しません。エミュレーターはx86で動作環境がことなるのでネイティブプラグインなどは注意してください。
Getting your app ready for HoloLens 2 - Mixed Reality | Microsoft Docs
Unityは2018.3および2019.1がサポートされています。 Unity 2019.1を使用した場合の違いはARMおよびARM64でのビルドが可能(2018ではARMのみ可能)、LI2CPPビルドのみ可能(.NETビルドは不可)
| 項目 | Unity 2018 | Unity 2019 |
|---|---|---|
| プラットフォーム | ARM | ARM, ARM64 |
| 対応ビルド | .NET, IL2CPP | LI2CPP |
Visual Studioは2017が推奨されていますが、Visual Studio 2019でもビルド可能です。ARM64ビルドはVisual Studio 2019でのみ可能となります。
既存のHoloLens 1アプリをHoloLens 2に移植する。 最初はかなり多いシナリオかと思います。今回はホロラボで開発したものを中心に4つほどHoloLens 2化しました。
Lenovo C630のようなPCのWindows 10 on ARM環境では、x86(Win32)でビルドした実行ファイルがそのまま動作します。 これはWindows 10 on ARM環境でx86のエミューレーションを行っており、本来はCPUアーキテクチャが異なるため実行できないx86の実行ファイルをARM環境で動作させることができます。なお、x86エミュレーションは32bitアプリのみでx64のような64bitアプリのエミュレーションはできません。
この機能はHoloLens 2にはないようで、x86でビルドしたアプリの配置や、パッケージのインストールはエラートなります。 そのため、既存のHoloLens 1アプリをHoloLens 2で実行させる場合は、ARMでビルドをし直す必要があります。
おおよそ2倍ほど性能あがってる可能性があります。
ARM(32bit)、ARM64(64bit)にかかわらず、アプリから使用できるメモリ量は2GBのようです。
開発機なので今後の改善に期待という前提で微妙な点
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
・SLAMのトラッキング精度
・色ムラ
・表示密度
・ハンドトラッキング
このくらい
少し広めに認識してました。
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
正面見た状態でキーボードのあたりの手は認識してます。という位置関係は追えるみたいです。 https://t.co/GylOVHSkQw
このあたりが限界? pic.twitter.com/jd8IzVgqDw
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
思った以上に自然にできた
そういう意味では視線に合わせてスクロールします(顔は動かさずに)。
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
MRCの投稿が禁止されてるので正確にお伝え出来ないのがツライのですが、このサンプルで地図の端をみると地図がするクロースする動作をしました。https://t.co/vu4pH8iSx5
Unity 2019 + MRTK v2 + ARM64でのビルドは一応実機動作まではOK
Unity 2019 + MRTK v2 + ARM64で動作確認できた#MRDevDays https://t.co/5Rx5EpuNFj
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
リサーチモードのみ
Depthへのアクセスはv1同様にリサーチモードからのみとのことです。 https://t.co/dMv5rBeiXf
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
持っているらしいけど、ドライバのインストールができないので、その制約がクリアできれば使えそう
ホストは持ってるそうです。ドライバがなんとかなればという感じみたいです。 https://t.co/UzxXErnnSR
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
現状、Hololens 2側のアプリがないためできない
[1]について、現状ではHoloLens側のRemotingアプリがないので動かせかったです。 https://t.co/S2aRtPz5Zu
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
HoloLens 1と同様に可能
]]>[2]について。
— 中村 薫(Kaoru Nakamura) (@kaorun55) 2019年5月3日
・MRCはv1同様にありました(Device Portalがv1とほぼ同じ)
・Miracastの安定性と速度がv1と比べてかなり上がってるようです(PCの接続アプリで確認)#MRDevDays https://t.co/S2aRtPz5Zu
今回は x64 Windows マシンの VisualStudio 2019 で UWP アプリを ARM64 向けにビルドし、 それを ARM64 マシンで実行してリモートデバッグする方法を紹介します。
「設定」アプリの「更新とセキュリティ > 開発者向け」ページで「開発者モード」を選択します。
さらに、同じページの「デバイスの検出 > デバイスがUSB接続とローカルネットワークに表示されるようにします」を ON にします。

「Remote Tools for Visual Studio 2019」は Visual Studio がインストールされていない環境でリモートデバッグを実行するためのツールです。
以下のページからインストーラをダウンロードできます。
ARM64 を選択し、ダウンロードボタンを押します。

インストールすると、 Remote Debugger というアプリがインストールされます。 これを起動しておくと、別マシンからリモートデバッグできる状態となります。


Visual Studio 2019 で UWP アプリケーションプロジェクトを作成します。
上部のメニューのソリューションプラットフォームで ARM64 を選択します。

次に、プロジェクトのプロパティページを表示します。
表示方法は、メニューの「デバッグ > (プロジェクト名) のプロパティ」をクリックするか、ソリューションエクスプローラーでプロジェクトを右クリックして「プロパティ」をクリックするかです。
「デバッグ」のページでターゲットデバイスを「リモートコンピューター」に設定し、リモートコンピューターの IP アドレスを入力します。 また、認証モードを「ユニバーサル(暗号化されていないプロトコル)」に設定します。

デバッグ実行を開始すると、初回のみ PIN 番号が求められます。

リモートデバッグマシンで 「設定」アプリの「更新とセキュリティ > 開発者向け」ページで「デバイスの検出 > ペアリング」ボタンを押すと、PIN番号が表示されます。

これをビルドマシンに入力するとペアリングが行われ、リモートデバッグが可能になります。
デバッグ実行すると、アプリケーションがリモートコンピューターで起動します。
ローカルで実行するときと同様に、コードにブレイクポイントをはってデバッグできます。

Unity で作る UWP アプリケーションを ARM64 対応する方法については、アキヒロさんがブログを書かれているのでそちらをご覧ください。
]]>まずは、公式のサンプルプロジェクトを動かすところから試してみました。
公式ドキュメントはこちらです。
まず、GitHub の gRPC リポジトリをクローンします。
$ git clone -b v1.19.0 https://github.com/grpc/grpc
クローンした grpc フォルダの中にある examples\csharp\Helloworld\Greeter.sln を Visual Studio で開きます。
Greeter, GreeterClient, GreeterServer という3つのプロジェクトが含まれていました。

GreeterClient と GreeterServer をそれぞれ実行します。
ただし、自分の環境ではそれぞれのプロジェクトにある Program.cs で指定されているポート番号を変更する必要がありました。
詳しいことは良くわからないのですが、デフォルトで指定されている 50051 ポートは Windows では何かの用途で確保されていて使えないようです。
参考: https://support.microsoft.com/en-us/help/4093046/ports-blocked-after-you-install-monthly-rollup-package-kb4074588
今回はポート番号を10051に変更して動作させました。
GreeterServer

GreeterClient

以下はサンプルコードから抜粋したコードです。
サーバ側のコード
クライアント側のコード
クライアント側では Name に "you" を代入した HelloRequest メッセージを作成し、SayHello メソッドを呼んでいます。
サーバ側では、Message に "Hello " + request.Name (ここでは "Hello you")を代入した HelloReply メッセージを返します。
クライアント側で HelloReply の Message を表示すると、"Hello you" が表示されます。
.proto ファイルは Protocol Buffers(プロトコルバッファ)のメッセージ構造を記述するものです。
gRPC は Protocl Buffers を使っていて、.proto ファイルでRPCのメソッドやメッセージ型を定義します。
サンプルプログラムでは、以下のような定義になっています。
記法を知らなくても、なんとなく以下のような定義が読み取れます。
この proto ファイルによる定義から、各言語(今回はC#)用のスクリプトが自動生成されます。
今回は gRPC の C# サンプルプログラムを動かしてみました。
次回は、空の UWP プロジェクトから gRPC クライアントを作成し、このサンプルプログラムと通信できるようにしようと思います。
こんにちは、たるこすです。
2018年10月に開催された Hacktoberfest というイベントに参加し、T シャツを貰いました。
Hacktoberfest は Hack, October, Festival を組み合わせた言葉で、OSS のお祭りです。
本家のイベントは DigitalOcean 社によって開催されているもので、10月中に GitHub で公開されている OSS に PR(Pull Request) を5つ送るとTシャツがもらえるというものです。 hacktoberfest.digitalocean.com
今回私が参加したのは Microsoft が開催した Hacktoberfest イベントで、10月中に Microsoft が公開している OSS に PR を1件送ればTシャツがもらえるというものでした。 cloudblogs.microsoft.com
HoloLens 用のライブラリである、MixedRealityToolkit-Unity に Pull Request を送りました。
HoloLens がオブジェクトに近づいたときに Stabilization Plane がカメラの近くにきてしまい描画が不安定になる問題があったので、Stabilization Plane の最小距離をカメラの NearClip の距離にするという内容です。
「コメントが来たらちゃんと答えられるかな...」とドキドキしていたのですが、特に何のコメントもなくマージされました。
2019/1/4 に Tシャツが届きました!

GitHub の vscode のリポジトリのページがイラストとして描かれています。
今年も Hacktoberfest が開催されるようであれば、是非参加したいと思います!
]]>
実演中、手順の中で「なぜここはこうしているの?」「私だったらこうするんだけどな」というような質問や意見が飛び交い、 活発に議論をしていました。(研究室のゼミのような雰囲気でしたw)
スライドにあること以外でも、例えば、以下のようなことについて議論しました。
本来、マーカーに用いる画像の選定などはVuforia公式のガイドラインに沿うのが良いと思います。
ただ、QRコードをしばしば用いたりする理由としては、
といった理由が挙げられました。もちろん、ロゴなどの画像を用いる場合、よりコンテンツとして現実を意識したものになるため、QRコードが必ずしもコンテンツにとって最適解というわけではありません。
作業を進めるなか、マーカーを大きめにして印刷した場合どうなるか?といった検証を行いたいことがあるようです(Unity内)。 この場合、inspectorにて、ImageTargetのScaleやImageTarget BehaviorのAdvancedオプションの値を変更すればよい。ただ、これはあくまでサッと検証したい場合での応急措置であり、製作する場合はきちんとマーカーの設定からやり直したほうがよいという結論に至りました。
使いたいマーカーの画像サイズは、縦横比が1:1になっていない場合があります。この場合、VuforiaサイトのTargetManagerにて画像サイズを登録する場合、widthには何の値を入力すれば良いか、ということが議論になりました。
回答としては、縦長であろうと横長であろうと、登録する画像の横幅を入力すれば良い。。。のですが、 ARコンテンツを作成する際の手順を踏まえながら考えるのがより良いと考えます。
というのは、コンテンツを作成する際、ユーザーはどこから入ってきて、どのようにマーカーを見て、どのようにオブジェクトやエフェクトを表示するか、という演出を事前に考えるはずです。そして、「登録する画像の横幅」というのは、ユーザーがマーカーを見るときの向きを考慮したうえで、画像をを作成・登録し、その画像を印刷した時の横幅を入力するのが良いのではないかと考えます。
VuforiaをUnityで使用する際、いくつかの手順を踏んでコンテンツを作ることになります。今回、社内での知見共有会にて議論した結果、新たに気をつけなくてはいけないポイントや、人によって手順や考えが異なる点(小さい違いではあるものの)などがあることが分かりました。そういった点を社内で共有することで、同じ技術を同じ期待値で製作することができるのではないか、とも考えられます。今後も、Vuforiaだけでなく、他の技術についても共有していきたいです。
]]>登壇含めて会社ブログの方には書いてたんですが、個人の活動は個人のブログの方に書いた方がいいかなぁと思ったりしました。
まぁ、会社運営も含めてやりながらいい方法を探していくしかないんですが。
ドメインも含めて変えようかな。
一年通しで無事終わりました。まぁ昨年も登記が1/18なのでほぼ1年ではあるんですが、11月決算なので年度としても丸一年ということで。
www.slideshare.net
今年どういう視点で仕事をしていたかというのは上記スライドを見てもらえればと思います。ホロラボはスタートアップではなくスモールビジネスなので、売り上げはきちんと立ってますがもうひと頑張りというところですね。そこには来年に向けての仕込みも入っているので、それがきちんと芽が出るかというのはドキドキではあります。
今年は人が増えて色々と規模も大きくなってきたのでだいぶバタバタしています。お金の規模、人の人数、仕事の規模とそれぞれステップが変わった感じがするので、それぞれをバランスするために考えることが多くてなかなか大変です。がそれも楽しかったりします(お金大事、人大事、仕事大事)。安直な言葉でいうと学びが多かったんですが、考えて実践してふりかえってをひたすら繰り返していました。伊藤さん含めてたくさんの人に助けてもらって、お客さん含めてたくさん迷惑をかけつつ、なんとか乗り切った感じです。まぁ実際にはこんなとことに書けることは上っ面でしかないのですがw
スライドにない部分で去年との変化としては、製造業系が増えた、いわゆる日本の大手メーカーが動いている、東京以外のお客さんが増えた。というところがあります。内容も検証段階とは言え1件1件がとても重い(ヘビーなほう)ので、実務メンバーには結構な負担になってる反面、それをこなす強力なメンバーに恵まれたという実感があります。こういうのはWebにあまり出ない部分なので、露出されるころにはだいぶ世界は変わった後なのかなと。そういう意味でTwitterやWebで見えてるHoloLens界隈の視界と、社内(というか自分かな)から見えるHoloLens界隈の視界はだいぶ違うんじゃないかなと思っています。
とりあえず2年間走ってふりかえって見ると、会社としての価値というものが意外といろいろなところに出始めてるとは感じています。といういう価値の部分をお金に換えて社員のみんなに還元できるとようにするのが今の自分の仕事なんだろうなとは思います。あとは立ち位置、期待値など面白い位置にいるのですが、そのぶん成果を出し続けないといけないので、それ自体も良くも悪くもなんでしょうね(当初のゆるふわな部分もあれば、そうでない部分もある)。
自分の仕事といえば、最近は雑談するのが仕事になってる面もあって、社員と雑談、お客さんと雑談などなど。どんなに技術が進歩しても対面での会話には勝てないと思うのは、そういうのがあったりします。0か1ではなく程度の問題なので、目的、用途、制約など、さまざまな条件には当然よるのですが。
まぁどうなるか分からないので変わらず走りながら考えるしかないですね。仕込みはいろいろしてますが、どれが当たるかわからないので弾は多く作っておくくらいしかないですね。とはいえ、発散しつつも収束するようになってくるとは思うので、変わらず面白い立ち位置には居られるんじゃないかなと思ってます。
自分の仕事的にはオフロードを心がけてみます。もうちょっと手を動かせる時間を作りたいなと。定期的に社内で議題に出しつつ答えが出てないのですが、いまやってることは営業も、マネジメントも、もちろん開発も手を動かして技術を理解してないと難しいんじゃないかと思っています(自分がそうだからってことで解はないのですが)。とにかく知識と技術は更新しておかないと。
平日が忙しすぎてCoder Dojoにすっかり行けなくなってしまいました。会社が落ち着くまではしょうがないかなぁと思ってます。。。
出張や打ち合わせが多くてあまり家にいられないのもちょっとなぁとは思いますが、これも会社が落ち着くまではしょうがないかぁと思ってます。。。
健康診断の結果もアレだったのですが、これも会社が落ち着くまではしょうがないかぁと思ってます(とりあえず平日の夜家にいるときのお酒はやめましたw)。。。
まぁ、しばらくは時間の大半は会社に振り分けですね。
]]>
akihiroさん(@akihiro01051)のHololens上でのwindowsML画像認識デモを
RS5で動かす時のメモです。
akihiro-document.azurewebsites.net
RS5への変更に伴い、windows MLの名前空間は以下のようにPreviewが除かれました。
Windows.AI.MachineLearning.Preview → Windows.AI.MachineLearning
そして、コード面でもいくつか変更点があったようです。
- Windows 10 Insider Preview 17763.1
- Windows 10 SDK Insider Preview 17763
- Visual Studio 2017
- Unity 2017.4.12f1
- Hololens RS5 preview 17720
まず、以下のリンクのリポジトリからWindows-Machine-LearningのサンプルをCloneします。
https://github.com/Microsoft/Windows-Machine-Learning
また、Windows-Machine-Learning\Samples\SqueezeNetObjectDetection\UWP\cs\Assets 以下にある
- model.onnx
- Labels.json
の二つのファイルを確保しておいてください。
次に、本記事冒頭で述べたakihiroさんのプロジェクトをCloneします。
GitHub - akihiro0105/WindowsMLDemo_HoloLens_Unity: This Repository is WindowsML demo(ObjectDetection) with Unity in HoloLens
その後、確保しておいた二つのファイルを、Assets\StreamingAssets 以下に置いてください。
(Labels.jsonは上書きで構いません。また、元のSqueezeNet.onnxは削除して大丈夫です。)
そして、Unityからプロジェクトをビルドし、生成されたvisual studioプロジェクトの
WindowsML_Demo.csを変更していきます
・ 10行目 using参照を変更します。
//using Windows.AI.MachineLearning.Preview; //削除 //追加 using Windows.AI.MachineLearning;
・ 28行目ファイル名を変更します。
SqueezeNet.onnx → model.onnx
・67行目 Previewを外します。
//private LearningModelPreview _model = null; //削除 //追加 private LearningModel _model = null;
・68, 69行目 この辺がsessionに統一され、使いやすくなった感じはあります。
//private ImageVariableDescriptorPreview _inputImageDescription; //削除 //private TensorVariableDescriptorPreview _outputTensorDescription; //削除 //追加 private LearningModelSession _session = null;
・97行目 SqueezeNet.onnx → model.onnx
・98行目Previewを外します。
//_model = await LearningModelPreview.LoadModelFromStorageFileAsync(modelFile); //削除 //追加 _model = await LearningModel.LoadFromStorageFileAsync(modelFile);
・100~103行目 sessionに統一され、コードもすっきり書くことができます。
//削除 //List<ILearningModelVariableDescriptorPreview> inputFeatures = _model.Description.InputFeatures.ToList(); //List<ILearningModelVariableDescriptorPreview> outputFeatures = _model.Description.OutputFeatures.ToList(); //_inputImageDescription = inputFeatures.FirstOrDefault(feature => feature.ModelFeatureKind == LearningModelFeatureKindPreview.Image) as ImageVariableDescriptorPreview; //_outputTensorDescription = outputFeatures.FirstOrDefault(feature => feature.ModelFeatureKind == LearningModelFeatureKindPreview.Tensor) as TensorVariableDescriptorPreview; //追加 _session = new LearningModelSession(_model, new LearningModelDevice(LearningModelDeviceKind.Default));
・146~148行目
// WindowsMLに入力,出力形式を設定する //削除 //LearningModelBindingPreview binding = new LearningModelBindingPreview(_model as LearningModelPreview); //binding.Bind(_inputImageDescription.Name, inputFrame); //binding.Bind(_outputTensorDescription.Name, _outputVariableList); //追加 LearningModelBinding binding = new LearningModelBinding(_session); ImageFeatureValue imageTensor = ImageFeatureValue.CreateFromVideoFrame(inputFrame); binding.Bind("data_0", imageTensor);
・151~152行目
// Process the frame with the model //削除 //LearningModelEvaluationResultPreview results = await _model.EvaluateAsync(binding, "test"); //List<float> resultProbabilities = results.Outputs[_outputTensorDescription.Name] as List<float>; //追加 var results = await _session.EvaluateAsync(binding, ""); var resultTensor = results.Outputs["softmaxout_1"] as TensorFloat; var resultVector = resultTensor.GetAsVectorView();
・157, 164行目 resultProbabilities → resultVector
結果としては以下のような動画になります。
画面に近づいた時には猫が、 ノートPCを写している時はノートPCとして認識されているのがわかるかと思います。
最後にブルームしたときのUIは、RS5ならではのUIです。
youtu.be
また、猫の画像はこちらを使用させていただきました。
・Hololens RS5でakihiroさん(@akihiro01051)のwindowsML画像認識デモを動かした
・その際の変更点などを示した
2018/09/29 にびっくりするアナウンスがありました!
Microsoft が Robot Operating System [ROS1] for Windows の試験的リリースを発表したのです!
ROS を知らない方向けに簡単に説明すると、ROS はロボット用のフレームワークで、主に研究用として世界中で幅広く使われています。
早速インストールしてみます。
以下のページに書かれている手順でバイナリインストールを実行します。
https://github.com/ms-iot/ROSOnWindows/blob/master/GettingStarted/Setup.md
まだ試験的なリリースのため、インストールの方法もまた変わってしまうと思うので、ここでは実行結果だけご紹介します。
コマンドプロンプトを開き、以下のように PATH の設定と setup.bat を実行します。
> set PATH=C:\opt\rosdeps\x64\bin;%PATH% > C:\opt\ros\melodic\x64\setup.bat
毎回実行するのは面倒なので、以下のようなバッチファイルを作って実行するといいと思います。
set PATH=C:\opt\rosdeps\x64\bin;%PATH% call C:\opt\ros\melodic\x64\setup.bat
roscore と rospy_tutorials の talker, listener を実行してみました。
talker が値を Publish し、listener が Subscribe して表示します。



ROS 版 Hello World と言える、talker, listener が無事動きました。
2018/9/30 時点では、ROS のすべてが Windows で動くわけではありません。 対応状況は以下のページに書かれています。
個人的には、ROS# に期待しています。
UWP や WPF などの Windows アプリで ROS が使えたり、Unity での 2D/3D アプリや VR アプリで ROS が使えたりすると、かなり出来ることが増えるので楽しみです。
こんにちは、たるこすです。
みなさん、交通費申請していますか?
私が所属している株式会社ホロラボでは、毎月 Google スプレッドシートに1か月分の交通経路と交通費を記入して申請することになっています。
ですが、毎日オフィスに行くわけではないので定期券を持っておらず、オフィスに行った場合も含めて交通費を記入しないといけないため、
毎月結構な量になってしまいます。
この作業が面倒だったので、Suica などの交通系 IC カードの履歴を読み取り、自動的に Google スプレッドシートに記入するシステム「にゃーん」を開発しました。
Suica の履歴を読み取って、自動的に Google スプレッドシートに交通費を書き込むシステム「にゃーん」が完成しました!
— たるこす (@tarukosu) 2018年7月19日
ソースコードはそのうち公開します🐱 pic.twitter.com/ROuEmKSuFT
「にゃーん」の仕組みですが、は大きく分けると以下の2つからなっています。
Suica の履歴を読み取る部分はえむにわさんのコードを利用させていただきました。
履歴として読み取れるのは直近20件の利用データです。
このデータに含まれているのは利用金額ではなくその地点での残高のため、前後2件のデータから利用金額を求めています。
また、読み取れる履歴には電車やバスなどの交通費だけでなくチャージやコンビニ等の支払い履歴も含まれていますが、
交通費だけのデータだけをスプレッドシートに書き込むようにしています。
交通費を書きこむスプレッドシートは、テンプレートとなるシートを用意しておいてそれを人ごと月ごとにコピーするようにしています。
スプレッドシートに重複してデータを書き込んでしまってはいけないので、
履歴データに含まれる ID(履歴ごとに1ずつ増えていく番号)を使ってまだ書き込まれていないデータのみを書き込むようにしています。
どの ID までを書き込んだかという情報は、交通費のシートとは別のスプレッドシートに書き込んでいます。
スプレッドシートへのデータの書き込みは、Google Spread Sheet API を使って行っています。 また、フォルダの作成や交通費申請シートのテンプレートのコピーは Google Drive API を使っています。
ソースコードは Github で公開しています。 github.com
セットアップ方法も Github のページに記載しています。
いくつか機材が必要にはなりますが、是非試してみてください。
セットアップに関する不明点は、Github の方に issue としてあげていただければと思います。
私は以下の機材を利用しました。
-Physical Computing Lab")
Raspberry Pi3 Model B ボード&ケースセット 3ple Decker対応 (Clear)-Physical Computing Lab

ソニー SONY 非接触ICカードリーダー/ライター PaSoRi RC-S380

iBUFFALO PC用スピーカー USB電源 ブラック BSSP29UBK
みなさんからの「作ってみたよ」という報告をお待ちしています!
]]>OpenCVforUnityのサンプルを利用します。
(ライセンス関係に抵触する可能性があるため、ソースコードを用いた説明は省きます。)
(また、ある程度OpenCVを知っていることを前提とします。Mat形式とか。)
具体的には、Hololensのカメラ画像をOpenCVforUnityで加工して透過表示するサンプルとして、
OpenCVforUnityのHoloLensComicFilterExample.csを編集していきます。
まずは、以下の動画をご覧ください。
Comic Filter Sample of OpenCVforUnity with HoloLens
少しわかりづらいかもしれませんが、
視線のある一定範囲に漫画の線が重なるような表示が透過されているのが確認できます。
このように、Hololensのカメラ映像をOpenCVforUnityで加工して、透過表示することができます。
次に、HoloLensComicFilterExample.csを編集し、
カメラ画像の特徴量を表示するように変更します。以下の動画をご覧ください。
ORB Feature Visualization Test of OpenCVforUnity with HoloLens
コミックフィルターをかける代わりに、
ORB特徴量として複数の小さい円が表示されているのが確認できます。
(右の画像は、静止画でORB特徴を算出した例です。)
これは、HoloLensComicFilterExample.csのOnFrameMatAcquired関数を変更しています。
流れを説明する前に、ちょっとポイントがあります。 これらのサンプルでは、実際のカメラの範囲より少し狭めになるよう、表示する画像を変換しています。 (変換部分をわかりやすくするため、処理を軽くするため等が考えられます。)
そのとき、カメラのサイズそのままの画像加工用のdstMat、
少し狭めの表示領域となるdstMatClippingROIがあります。
確認が取れていないので、推測になりますが....
dstMatClippingROIは、その表示領域部分のみdstMatのメモリを参照しています。(のはず)
つまり、dstMatClippingROIのみ加工し、dstMatごと、テクスチャに貼るMatへコピーするという流れになります。
(ちょっと自信ない)
そして、以下がOnFrameMatAcquired関数での流れとなります。
① Hololensカメラ画像 → 変数bgraMat (BGRA32形式のMatデータ)として受け取る
② 変数bgraMatを表示サイズへ変換
(Mat bgraMatClipROI = new Mat(bgraMat, processingAreaRect);)
③ bgraMatClipROI → dstMatClippingROI (この時にしたい処理をする。今回は特徴量表示。)
④ dstMat → bgraMatへコピー
私のリポジトリは現在メンテナンスしていません。
ROS# を UWP で使いたい場合は、公式の README にも記載されている以下のリポジトリを使ってみてください。
こんにちは、たるこすです。
シーメンスが公開している ROS# という OSS を UWP 対応させました。
オリジナルのリポジトリはこちら github.com
UWP 対応させたものはこちらです。 github.com
ROS# は Unity アプリから ROS のトピックをやりとりするためのライブラリです。
URDF のロボットモデルから Unity の GameObject を作成するツールも入っています。
ROS のトピックをやりとりする仕組みですが、Unity 上で ROS が 動くというわけではなく、rosbridge を利用しています。
rosbridge というのは、ROS を利用できない環境 (Webページ, Windows など)から ROS を使えるようにするため、JSON 形式で データを中継してくれる仕組みです。通信方式は Websocket, TCP, UDP がサポートされていて、ROS# では Websocket を使っています。
UWP とは Universal Windows Platform の略称で、Windows 10 で動作するアプリ形式です。通常の PC であれば従来の .exe のアプリケーションも動作しますが、HoloLens では UWP アプリしか動作しません。そのため、HoloLens で ROS# を動かすには UWP で動作するよう修正する必要がありました。
Unity Editor 上や .exe 形式にビルドして実行した場合と UWP でビルドして実行した場合では実行環境が違い、一部 API が UWP で使えません。また、プラグイン(DLL) も UnityEditor 用と UWP 用にそれぞれビルドしたものを使う必要があります。


Editor 用プラグインは Assets > RosSharp > Plugins に、UWP 用プラグインは Assets > RosSharp > Plugins > WSA に配置しています。
https://github.com/siemens/ros-sharp/tree/master/Unity3D/Assets/RosSharp/Plugins
ROS# では、以下の DLL が Unity のプロジェクトに入っていました。
これらの UWP 用のものを用意する必要がありましたが、UrdfImporter.dll については一旦あきらめました。 UrdfImporter は URDF 形式のロボットのモデルファイルを読んで Unity のオブジェクトとしてインポートする機能ですが、動的な読み込みを諦めれば Unity Editor 上でのみ動作すれば事足りるためです。さらに、MathNet.Numerics.dll とSystem.Threading.dll は UrdfImporter.dll で利用しているものだったため、これらも必要なくなりました。
Newtonsoft.Json.dll については、UWP で動作する dll も配布されているので、そちらをインポートしました。
websocket-sharp.dll は UWP 版が無いのですが、UWP の MessageWebSocket を使って websocket-sharp とインタフェースを合わせたクラスのコードが公開されており、そちらを利用しました。 github.com
さて、残るは RosBridgeClient.dll です。
RosBridgeClient.dll を作成するプロジェクトは ROS# のリポジトリに入っています。このプロジェクトをもとに、以下の前本さんのブログを参考にして UnityEditor 用の DLL を作るプロジェクトと UWP 用の DLL を作るプロジェクトを作成しました。 satoshi-maemoto.hatenablog.com
ソースコード: https://github.com/tarukosu/ros-sharp/tree/master/RosBridgeClient

ソースコードは共有にしていて、UnityEditor 用と UWP 用でコードを書き分けたい場合は以下のようにしています。
#if NETXF_CORE // UWP 用コード #else // Unity Editor 用コード #endif
RosBridgeClient では、URDF を読むところで Thread を使っていて UWP ではコンパイルできないため、以下のようにして UWP ではコードを無効にしています。
Task を使えば同等のことは実現できるのですが、未実装です。
private void receiveRobotDescription(ServiceReceiver serviceReciever, object serviceResponse) { #if NETFX_CORE //TODO imprementation #else string robotDescription = formatTextFileContents(((ParamValueString)serviceResponse).value); Thread importResourceFilesThread = new Thread(() => importResourceFiles(robotDescription)); importResourceFilesThread.Start(); Thread writeTextFileThread = new Thread(() => writeTextFile((string)serviceReciever.HandlerParameter, robotDescription)); writeTextFileThread.Start(); Status["robotDescriptionReceived"].Set(); #endif }
Unity の C# スクリプトでも同様に、UWP で利用できない API を使っている部分を UWP でも動作するように修正しました。
ClockTimePublisher というスクリプトで Thread を使っていたので、以下のように UWP では Task を使うように書き換えています。
public class ClockTimePublisher : Publisher { ... #if NETFX_CORE private Task task; private CancellationTokenSource tokenSource; #else private Thread clockTimeIterate; #endif protected override void Start() { base.Start(); #if NETFX_CORE tokenSource = new CancellationTokenSource(); CancellationToken token = tokenSource.Token; task = new Task(async () => { while (true) { if (token.IsCancellationRequested) { break; } StartPublication(EventArgs.Empty); await Task.Delay(timestep); } }, token); task.Start(); #else clockTimeIterate = new Thread(ClockTimeIterate); clockTimeIterate.Start(); #endif } ...
以上の変更を行うことで、ROS# を UWP でビルドできるようになりました。
次のブログ記事では、この ROS# を使って HoloLens アプリを作成した話を書く予定です。
マイクロソフト MVP アワード プログラムとは - マイクロソフト MVP
自身の活動について少し振り返ると、本格的にブログを書き始めたのは 2016 年の 11 月からになります。その数ヵ月後に HoloLens と出会ってその面白さに取りつかれ、その後は主に HoloLens 関連の技術ブログを書いてきました。
この一年の活動としては、ブログ・Twitter での情報発信の他に、コミュニティイベントでの スタッフ・LT・展示も行っていました。
blog.d-yama7.com tarukosu.hatenablog.com
今後も引き続き HoloLens コミュニティを盛り上げて行きたいと思います!
]]>こんにちは、たるこすです。
みなさん、バイナリデータ読んでいますか?
今回は、バイナリデータを読むのに便利な Visual Studio Code(VSCode) の拡張機能「hexdump for VSCode」を紹介します。
以前まではバイナリデータを読むときには vim のバイナリモードを使っていたのですが、 この拡張機能があることを知り、使ってみたところとても便利でした。
VS Code の拡張の 「hexdump for VSCode」がめっちゃ便利だった。
— たるこす (@tarukosu) 2018年6月20日
マウスカーソルを合わせるとそこから先の数バイトを Int とか Float とかとして読んだ場合の値を表示してくれる pic.twitter.com/vSF5vC8GTw
twitter で軽くツイートしてみたら、800 件以上のリツイートと 1600 件以上のいいねがついたのでかなり驚きました。
これは興味がある方が多そうだということで、ブログ記事を書くことにしました。
VSCode をインストールしていない場合は、以下のサイトからインストールしてください。
VSCode を起動したら、左側のメニューの四角いアイコンが拡張機能のマークです。クリックし、検索欄に hexdump と入力します。 hexdump for VSCode が表示されたら、「インストール」ボタンをクリックします。

「再読み込み」ボタンをクリックすると、機能が有効になります。

hexdump for VSCode のインストールができていれば、ファイルを右クリックすると「Show Hexdump」というメニューが出てきます。

「Show Hexdump」をクリックすると、以下のようにバイナリデータが表示されます。

2桁の16進数ごとにスペースを空けて表示されています。この2桁の値が 1Byte です。また、右側の緑色で表示されているものは ascii コードで解釈したときの文字です。
スクリーンショットだとマウスカーソルが消えてしまっていますが、カーソルをデータに合わせるとそこから先の数倍とを Int8, Float32, Float64 などとして読んだときの値が表示されます。デフォルトでは Little Endian で値を解釈します。右クリックし、Toggle Between Little and Big Endian をクリックすると、Little Endian と Big Endian を切り替えられます。

バイナリデータはただのバイト列なので、値を読み取るにはファイルフォーマットに沿って解釈していく必要があります。
今回は、3D モデルデータのフォーマットである STL ファイルを読んでみます。フォーマットについては、以下のページを参考にさせていただきました。モデルデータについても以下のページで配布されていた cube-binary.stl を使っています。
最初の 80 バイトは文字列が入っているということで、右側の緑色の文字を読むと cube-binary というモデル名が入っていることがわかります。また、そのあとはスペースで埋められていますが、53バイト以降はよくわからない値が入っていました。

81バイト目から4バイトが三角形の枚数です。00000050: の右の 0C にカーソルを合わせると、以下のようになります。Uint 32: の欄を見ると 12 となっているので、三角形は 12 枚ということがわかります。

次からは 4 バイトの float が連続します。
00 00 00 00 00 00 00 80 00 00 80 3F
カーソルを合わせて Float32: の欄を読み取ると 0, 0, 1 と読み取ることができます。
ここから先も同様に float のデータを読んでいけば値を読み取っていけます。
バイナリデータを読む機会があれば、「hexdump for VSCode」をぜひ使ってみてください。
]]>こんにちは、たるこすです。
2018/6/23 に開催された HoloLens Meetup で HoloLens, ロボットアーム(uArm Swift Pro), RealSense D415 を使ったデモを展示しました。
もともとは HoloLens でトランプをタップすると、その位置にアームが動いてトランプを吸い上げ、箱の中に入れるというデモをしようと思っていました。
しかし、プログラム自体は動作したのですが、ロボットアームの調子が悪くアームを持ち上げるときに関節の角度が指令値とずれるという現象が発生してしまいました。
そのため仕方なく、ロボットアームを手で動かすと HoloLens 上で表示しているロボットも現実のアームと同期して動作するというデモに切り替えました。
また、このデモでは RealSense で取得した点群データを表示するという機能もあります。
点群データをそのまま送ると転送データ量が多くなる上 HoloLens 側での描画がつらいめ、ダウンサンプリングしたデータを HoloLens に送って表示しています。

ちょっとわかりづらいですが、中央の綾鷹のペットボトルに点群が重畳表示されているのがお分かりいただけると思います。
仕組みについて、ものすごく簡易的に説明します。
ロボットアーム、RealSense は PC (Ubuntu) に接続されており、この PC がロボットアームの間接角や RealSense のセンサーデータを取得します。 PC から HoloLens へは WebSocket を使ってデータを送っています。
HoloLens アプリ内は取得した間接角を元にロボットアームのモデルを変形させて描画しています。
詳しい話は別途ブログ記事を書きたいと思います。
アプリを体験していただいた方からコメントをいただきました!
宮浦さん
「RealSense はデバッグがしやすくなって便利そう。なにが見えている見えていないというのがわかってよい。
ロボットアームの仕組みは操作手順の説明、危険予測、作業支援などに活用できそう。」
井出さん
「ロボット、ROS、HoloLens は熱い! 早くロボットを HoloLens で動かしたい!」
匿名
「ロボティクスxHoloLensは面白い!」
ごんちゃん
「工場の生産ラインとかでHololensが活用できる日も近い!(かも!)」
シンさん
「センサーとMRすごい未来感あって楽しみ!」
PE 江畑さん
「SF感あって半端ないって!」
サミィさん
「なんかスゴイのはちょっと被っただけでわかりました。
センサーと合体すごい!」
woops39 さん
「これが初HoloLensでした笑
未来感ですね!!」
るこてこさん
「ロボットとしっかり動きがリンクされてて感動しました!
現実のロボットがよりかっこよく見えるようになったらいいですね!」
pown さん
「危険作業の確認とかに使えそうと思いました。」
mitsuru さん
「IoTとMRはすごく親和性が高いと思っていて、真骨頂をみた感じがしました。」
Jack さん
「点群のデータがすごい!IoT最高!!!」
YusukeSaito さん
「デバッグ用にモーターの状態などの数値情報が可視化できると最強だと思います。」
デモを体験していただいた皆さん、コメントをいただいた皆さん、本当にありがとうございました!
]]>先日、HoloTheremin(ホロテルミン) という HoloLens アプリをストア公開しました。ストア公開した HoloLens アプリはこれで2つになりました。
指を上げると音が出て、指の位置によって音が変化するという楽器アプリです。詳しくは以下の動画を見てみてください。
このアプリを作ったきっかけはごんびぃーくんのツイートでした。
— ごんびぃーさん (@GONBEEE_project) 2017年12月18日
これをみて、まず初めに作ったのが以下の動画です。
ごんびーくんアイデアの Holoテルミン 作ってみた(イメージと違うかもしれないけど)
— たるこす (@tarukosu) 2017年12月21日
鏡に向かって撮影してます#HoloLens #HoloLensJP #Holoテルミン pic.twitter.com/ii2XhzvIDF
この時は、指の位置に合わせて Sin 波で音を生成したんですが、なんというか味気ない音になってしまったので、その後しばらくの間放置プロジェクトになっていました。
ストア公開したバージョンでは、スクリプトで音を生成することをあきらめ、楽器音の再生速度を変えることで音の高低を変えるようにしています。
]]>UWPには、アプリをBackgroundで実行するためのバックグラウンドタスクが用意されています。 まずは、以下の動画をご覧ください。BackgroundでMusicを再生しながら、Reseach Modeを呼んでいる様子です。 (ソースコードはMicrosoftのWindows-universal-samplesを利用しています。 https://github.com/Microsoft/Windows-universal-samples/tree/master/Samples/BackgroundMediaPlayback)
(また、ResearchModeのアプリは@akihiroさんのブログ(http://akihiro-document.azurewebsites.net/post/hololens_researchmode2/)の UWP(C#)版を利用しています。)
さて、ここでバックグラウンドタスクにおける二種類のプロセスがあるそうです。 この二つのプロセスについて、まとめてみました。 (参考 : バックグラウンド タスクのガイドライン - UWP app developer | Microsoft Docs )
A. インプロセス
アプリとそのバックグラウンド プロセスが同じプロセスで実行されるプロセス。
今回のBackgroundMediaPlayer Sampleはこちらのプロセスを利用しています。
[利点]
インプロセス バックグラウンド タスクでは、プロセス間通信が不要のため、記述内容は複雑になりません。
[欠点]
インプロセス バックグラウンド タスクでは、DeviceUseTrigger、DeviceServicingTrigger、IoTStartupTask の各トリガーがサポートされていません。
(→センサ系のトリガーが使えない)
また、アプリケーション内での VoIP バックグラウンド タスクのアクティブ化がサポートされていません。(→VoIPはアウトプロセス)
[特徴]
Application オブジェクトから EnteredBackground と LeavingBackground という 2 つの新しいイベントを使用できます。
EnteredBackground イベントは、アプリがバックグラウンドで実行されている間に処理されるコードを実行します。また、LeavingBackground イベントは、アプリがフォアグラウンドに移動したことを知るために処理します。
(シンプルに実装できる。)
B. アウトプロセス
[利点]
アウトプロセスタスクでのコードがクラッシュしても、フォアグラウンドでのコードはクラッシュしません。また、 DeviceUseTrigger、DeviceServicingTrigger、IoTStartupTask の各トリガーを使用できます。
[欠点]
プロセス間通信を利用するため、記述内容が複雑になりがちです
[特徴(というより、書くべき処理)]
- IBackgroundTask インターフェイスを実装するクラスを作ると、コードをバックグラウンドで実行できます。 このコードは、SystemTrigger や MaintenanceTrigger などを使って特定のイベントをトリガーすると実行されます。
- 実行するバックグラウンド タスクを登録します
- イベント ハンドラーでバックグラウンド タスクの完了を処理します
- アプリがバックグラウンド タスクを使うことをアプリ マニフェストで宣言します
(工程が多く複雑(?)。)
- カメラセンサ情報 + Networkをbackgroundで実行、サーバー側にセンサ情報を投げ続ける。 この場合、アウトプロセスを利用する必要があると考えます。
アプリをBackgroundで実行する様子と、そのために用意されたバックグラウンドタスクにおける二つのプロセスについてまとめました。 今回は公式ドキュメントの中で用意された二つのプロセスについて着目しましたが、実装面には触れていません。 Backgroundで何を処理させたいかで、どちらのプロセスを選択すべきかが変わる、といったところでしょうか。 今後は、Hololensのカメラセンサ等をBackgroundで処理していこうと思います。
]]>点群処理といえばコレ、といったくらいメジャーなPoint CLoud Library(http://pointclouds.org/)をwidows + visual studio 2017でプログラミングできるようにしていきます。
...とはいっても、先行的に@UnaNancyOwenさんなどがall-in-one packageを作成しており、導入を楽にしていただいています。とても助かっていますw
まずはじめに、パッケージをインストールしましょう。
http://unanancyowen.com/pcl181/
にアクセスします。次に、以下の図1の中の自分の環境に合わせたものをダウンロードします。 (私の場合、PCL 1.8.1 All-in-One Installer MSVC2017 x64です。)

ダウンロードしたら、exeファイルを起動してインストールしていきます。
今回、PATHは自動で追加しないようにします。
(最近のブログを見ると、追加しても大丈夫になってるっぽい。)
他は、defaultのままで大丈夫です。
次に、環境変数を設定していきます。
大雑把に説明すると、「PCLの実行ファイルはここにあるよ!」ということをPCに教えてあげます。
「winsowsキー(窓が書いてあるキー)+R」で「sysdm.cpl」をファイル名を指定して実行し、システムのプロパティを呼びます。
そして、詳細設定タブ->環境変数をクリックすると、図2のような画面が現れるはずです。

システム環境変数において、「PCL_ROOT」「OPENNI2_REDIST64」があることを確認してください。
(なければ、図2と同様に上記二つの変数と値を入力してください。)
次に、pathを設定します。pathの列をクリックし、編集ボタンをクリックすると、図3のような画面が現れます。 図3の下部5行を追加してください。(3rdPartyの部分は要らないかもですが、念のため)

PCLはCmake(https://cmake.org/)でのプロジェクト生成を推奨されています。そこで、CMakeをインストールします。 公式ページのdownloadから環境に合わせたwindowsインストーラーパッケージをダウンロードし、インストールします。 この際、PATHを自動登録し、デスクトップアイコンにチェックを入れましょう(この辺は好みでw)
インストールしたら、「winsowsキー+R」で「cmd」を実行、コマンドプロンプト上で「cmake -version」と打ち、以下の図4にようになればOKです。 ここで、一度PCを再起動させてください。(環境変数の変更を適用するため)

Point Cloud Library 1.8.1 has been releasedhttp://unanancyowen.com/pcl181/に、「Basic CMakeLists for PCL」の項があります。 Basic CMakeLists.txt for PCL(https://gist.github.com/UnaNancyOwen/f4dcd74ab870a0fc9e7a)の右上にDownload ZIPをクリックし、解凍し、フォルダ名を分かりやすいように変更しましょう。今回は、図5のように、フォルダ名を「sampleProject」に変更しています。

次に、CMakeを起動し、上部二つのダイアログボックスに先ほどのsampleProjectのパスを指定します。 configureをクリックし、お使いの環境のvisual studio(今回ならvisual studio 15 2017 WINI64)、use default native compliersを選択、Finishボタンをクリック。 そのまま「Generate」をクリック、Generate doneというログが出たら、「Open Project」でプロジェクトを開きましょう。
以下の図6のようなプロジェクトが開かれていると思います。この状態で、「Ctrl + F5キー」を押すと、main.cppが実行されます。

main.cppの実行を確認したあとは、PCLのサンプルを実行してみましょう。
project->Source Files->main.cpp をダブルクリックして開き、以下のコードに置き換えて「Ctrl + F5キー」で実行してみてください。
(source codeはこちらのものを変更しています:http://www.pointcloud.jp/blog_n14/)
#include <pcl/visualization/cloud_viewer.h> #include <iostream> #include <pcl/io/io.h> #include <pcl/io/pcd_io.h> int user_data; void viewerOneOff(pcl::visualization::PCLVisualizer& viewer) { viewer.setBackgroundColor(1.0, 0.5, 1.0); pcl::PointXYZ o; o.x = 1.0; o.y = 0; o.z = 0; viewer.addSphere(o, 0.25, "sphere", 0); std::cout << "i only run once" << std::endl; } void viewerPsycho(pcl::visualization::PCLVisualizer& viewer) { static unsigned count = 0; std::stringstream ss; ss << "Once per viewer loop: " << count++; viewer.removeShape("text", 0); viewer.addText(ss.str(), 200, 300, "text", 0); user_data++; } int main() { pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>); pcl::visualization::CloudViewer viewer("Cloud Viewer"); viewer.showCloud(cloud); //This will only get called once viewer.runOnVisualizationThreadOnce(viewerOneOff); //This will get called once per visualization iteration viewer.runOnVisualizationThread(viewerPsycho); while (!viewer.wasStopped()) { user_data++; } return 0; }
マウスのホイールを引き、左クリックを押したまま移動で、原点を中心に回転できたりします。 すると、以下の図7のような画面が出てくると思います。これが出てきたら、PCLのセッティングは一旦完了となります。

windows10 + visual sturido 2017の環境にて、PCLのセットアップを行いました。 今後は、さまざまな点群処理の実装を行っていこうかと思います。
]]>RGBカメラセンサといえば視野の範囲内の映像を平面上に表示するのが一般的でした。 しかし近年AR(Augumented Reality)やVR(Virtual Reality)技術の発展により、 平面ではなく立体的に展開された映像を体験することが容易となっています。
そして立体的に展開された映像を撮影するために、様々なデバイスが提案されています。 その中でも、今回はRICHO THETA VとMirage Cameraについて着目します。
RICHO THETA V は上下左右360度全ての方向を撮影することができるカメラです。
4K画質(3840 x 1920、56Mbps)、30fpsの動画を撮影することができます。
Mirage Camera は VRヘッドセットであるMirage soloと同時に発表されたデバイスです。
全面に1300万画素のカラーカメラが二つ付いており、こちらは前方を基準に上下左右180度の映像を撮影できます。
また、仕様を見るとこちらもRICHO THETA Vと同様に4K画質、30fpsの動画を撮影することができます。

図1にカメラ性能などの比較した図を載せます。また、これらは各公式サイトから引用しています。 RICHO THETA V も Mirage Cameraも、どちらも4K画質で動画を取得することができます。 しかしながら、前者は360°、後者は180°の映像出力に最適化されているため、当然見え方が変わってくるはずです。
次に同じ4K画質で動画を撮影できるため、Mirage Cameraの方が狭い視野の反面、綺麗な見た目で撮影できると予想しています。
その際、どの程度綺麗にとれるのか?ということに興味が湧いています。
さらに、この解像度次第では高度な画像処理にも耐えうるかもしれません。
....と、妄想が膨らむところで、今後実際の使用感について書いていこうと考えています。
]]>Unity Editor および HoloLens で SignalR が使えたので、その方法を紹介します。
かずき (@okazuki) さんがブログで SignalR を Windows Mixed Reality で使う方法を紹介されていたのですが、UWP でしか動かないと Unity Editor でデバッグできなくて面倒なので、Unity Editor でも使えるかどうか試してみました。
先ほどのかずきさんのブログを参考にして ASP.NET MVC で実装しました。
ブログの通りに実装して実行したところ、"ファイルまたはアセンブリ 'Microsoft.Owin'、またはその依存関係の 1 つが読み込めませんでした。見つかったアセンブリのマニフェスト定義はアセンブリ参照に一致しません。" というエラーが発生しました。

インストールされていた Owin のバージョンが古かったことが原因で、4.0.0 に更新すると動きました。

はじめに、以下のページから NuGet のコマンドラインツールをダウンロードします。
ダウンロードした nuget.exe にパスを通すか、コマンドプロンプトで nuget.exe があるディレクトリに移動した後で、以下のコマンドを実行します。
> nuget install Microsoft.AspNet.SignalR.Client -OutputDirectory signalr
すると、signalr ディレクトリに SignalR.Client とその依存パッケージ(Newtonsoft.Json) がダウンロードされます。

Microsoft.AspNet.SignalR.Client.2.2.3 ディレクトリには lib フォルダがあり、その中にプラットフォーム別の DLL が入っています。

Unity 2017 ではデフォルトの .NET のバージョンが .NET 3.5 なのですが、SignalR.Client は .NET 3.5 で使えるものがなかったので、Unity の .NET のバージョンを上げる必要があります。
Player Settings の Other Settings 欄の Scripting Runtime Version を Experimental (.NET 4.6 Equivalent) に変更することで、.NET 4.6 までの DLL が使えるようになります。

次に、Assets 内に Plugins フォルダを作成し、その中に WSA フォルダを作成します。Plugins フォルダは Assets 直下じゃなくても大丈夫です。
Plugins フォルダ内に、Microsoft.AspNet.SignalR.Client.2.2.3\lib\net45\Microsoft.AspNet.SignalR.Client.dll と Newtonsoft.Json.6.0.4\lib\net35\Newtonsoft.Json.dll をインポートします。また、両方とも Inspector で Any Platform のチェックを外し、Include Platforms の WSAPlayer のチェックを外します。これで、この DLL は Unity Editor 上では使われますが、UWP では使われなくなります。

次は、UWP 用の DLL をインポートします。
WSA フォルダに
Microsoft.AspNet.SignalR.Client.2.2.\lib\netcore50\Microsoft.AspNet.SignalR.Client.dll と
Newtonsoft.Json.6.0.4\lib\netcore45\Newtonsoft.Json.dll をインポートします。
こちらの DLL には、WSAPPlayer のみチェックが入るようにします。

かずきさんのブログの SignalRManager.cs を作成し、適当な GameObject にアタッチします。ただし、スクリプト内の
#if UNITY_UWP
#endif
は削除します。
これで、Unity Editor 上でも、UWP (HoloLens) でも SignalR が使えるようになりました。
]]>SignalR を使ってオブジェクト生成 pic.twitter.com/kP7KUWum1s
— たるこす (@tarukosu) 2018年4月27日
半面、CoderDojoは当日参加以外のところまで手が回らなかったのが申し訳ないところです。
個人的には今年は会社と仕事を回すことが精いっぱいでアウトプットが少なかったです。とはいえ、ホロラボのメンバー含めて自分よりも細かくアウトプットを出す方が増えたので、やり方含めて考えないといけない時期なのかもです。
会社的には今年は助走のつもりで動いていました。おかげさまで2018年は年明け早々フルスロットルな感じです。強力なメンバーも順次増えていく予定で、会社としてもアウトプットも順次出していけると思います。
強力なメンバーに集まってもらうことができたので、来年は個人→グループ→チームにしていくことが自分の仕事になると思っています。向こう数年はまたプログラマーというロールから一旦はずれる時期になりそうです。
ということで、来年もよろしくお願いします。
1位がRealSenseなのと、9位にRedmineのBacklog Pluginの記事が入ってた(6年前)。
| 順位 | ページ | PV |
|---|---|---|
| 1 | Intel RealSense まとめ | 8204 |
| 2 | HoloLensまとめ | 7278 |
| 3 | Kinect for Windows SDK v2.0 でDepth(距離)データを取得する | 6268 |
| 4 | Kinect for Windows SDK v2.0 でBody(関節など)を取得する | 5920 |
| 5 | Intel RealSenseをMax OSやLinuxでも使える librealsense を使ってみた | 4950 |
| 6 | HoloLensアプリの開発を始めるまでの資料を作りました | 4824 |
| 7 | HoloLensの環境マッピング(Spatial Mapping)の使い方 | 4409 |
| 8 | これから Kinect for Windows SDK を始めたい人へ | 4336 |
| 9 | RedmineのBacklogsプラグインを使ってみた | 4334 |
| 10 | Microsoft Kinect v2まとめ | 3518 |
こんにちは、たるこすです。
今回の記事は Oculus Rift Advent Calendar 2017 の19日目の記事です。
HoloLens と Tango を連携させ、Tango を HoloLens 用ガンコントローラとして使ってみました。
まずはデモ動画をご覧ください。
Tango とは Google が開発した AR フレームワークで、対応端末は 2機種(Zenfone AR, Phab 2 Pro) 発売されています。
外部センサなしで高精度の SLAM を行うことができ非常に優秀なのですが、残念なことに Tango ブランドは終了することが発表されています。さらに、12/15 には、Tangoのサポートは 2018年3月1日 に終了するということが発表されました。 jp.techcrunch.com
ガンコントローラのトリガーは Tango アプリで取得し、HoloLens に送信しています。 また、Tango の位置を HoloLens に送ることで、HoloLens でガンコントローラの位置を取得できます。
しかし、Tango アプリと HoloLens アプリでは座標系が異なってしまうので、Tango から受け取った値そのままでは HoloLens 上では正しい位置になりません。
そこで、Tango アプリの画面にマーカー画像を表示し、それを HoloLens で認識した際に HoloLens 座標系での Tango の原点を計算します。 Tango アプリから受け取った座標は Tango 原点から見た座標なので、それを先ほど計算した Tango の原点を使って HoloLens 座標系に変換します。
こうすることで、HoloLens アプリで Tango の位置を使って操作ができるようになります。
カワダから発売されている、AR マジックガンというおもちゃのコントローラを使いました。
本来の使い方は、ガンに普通のスマートフォンを取り付け、壁に貼ったポスターをマーカーとしてスマホの画面で AR ゲームをするというものです。公式のスマホアプリを入れるとガンコントローラと Bluetooth 接続し、トリガーのボタンを取得できます。
今回は自作のアプリでガンコントローラと接続して値を読み取りたかったのですが、調べても情報が見つからなかったため方法がわかりませんでした。そこで、ガンコントローラを分解し、中のスイッチにジャンパーワイヤーをはんだ付けして外に取り出し、Teensy というマイコンで ON/OFF を読み取りました。Teensy は Zenfone AR に USB で接続し、Zenfone AR からはキーボードとして認識させています。

このあたりの話は、また別記事に詳しくまとめようと思います。
作成した Tango アプリの機能は以下の2つです。
実装内容については、大きく分けて以下の3つになりました。
Tango SDK に含まれている、Tango Manager と Tango Camera のプレハブをシーンに配置しました。


これで、Tango 端末の位置に合わせて Main Camera が移動するようになります。
以下のような画面を作成しました。

シーンには以下のように、Canvas に RawImage, InputField, Button を配置しています。

RawImage は HoloLens で認識するためのマーカー画像を表示する用です。
InputField と Button は、HoloLens と通信する際に必要となる HoloLens の IP アドレスを入力するために使います。 アドレスを入力してボタンをタップすると、IP アドレスが設定され、入力欄は非表示にしています。
Tango アプリから HoloLens へのデータの送信には、UNET の LLAPI (Low-Level API) を利用しました。
以前利用した際もブログに書いていたので、こちらも併せてご覧ください。
データ送受信のマネージャとして、以下のスクリプトを作成します。このスクリプトは、受信側の HoloLens アプリでも使用します。
これを空のゲームオブジェクトにアタッチし、以下のように設定します。

Tango の位置やコントローラ入力は、以下のスクリプトで送信します。
これを、空のゲームオブジェクトにアタッチし、NetworkManger として先ほど作成したオブジェクトを設定します。

これで、Tango アプリは完成です。
プロジェクトに HoloToolkit-Unity をインポートします。
シーンに、HoloLensCamera, Directional Light, SpatialMapping を配置します。Directional Light は 1つだと風船が暗く見えてしまったので、2つ設置しました。


また、はまりやすいのが Capability の設定です。今回のアプリでは以下の設定が必要なので、気を付けてください。
UNET でデータを受信するため、先ほど Tango アプリでも利用した LLAPINetworkManager.cs を使います。
LLAPINetworkManager.cs を空のオブジェクトにアタッチし、以下のように設定します。

HoloLens アプリの LLAPINetworkManager で設定する Local Port の番号と、Tango アプリで設定する Server Port を一致させるようにしてください。
さらに、受信したデータを処理するスクリプトとして、以下の UnetTangoController.cs を作成します。 ボタンの値を受信した場合は SelectButton の値が変更され、位置を受信した場合は UnetTangoController.cs がアタッチされたオブジェクトの位置が変更されます。
ITangoController.cs は以下のようなスクリプトです。
初めは、通信に Photon を使っていたので、切り替えを簡単にできるようにインタフェースを作りました。
光線銃オブジェクトは、ヒエラルキーでは以下のような構成となっています。

TangoOrigin が Tango 座標系の原点、Gun が Tango(ガンコントローラ)の位置、Muzzle が銃口、Aim が照準となっています。
Gun オブジェクトにアタッチする GunScript.cs では、先ほどの UnetTangoController.cs で取得した値を使って光線銃の処理を行います。GunScript.cs から関係する部分だけを抜き出すと以下のようになります。
このスクリプトでは、Gun オブジェクトの Position, Rotation を Tango から受け取った値に更新しています。正確に言うと、Tango から値を受け取るフレームレートが低くそのままだとカクカクして見えてしまうため、滑らかに見えるように前の値と補間して設定しています。
マーカー画像の認識には Vuforia を使っています。
シーンに ARCamera と ImageTarget のプレハブを配置し、認識のための設定を行います。
詳しくは以下のブログをご覧ください。 tarukosu.hatenablog.com
さらに、ImageTarget に以下の CustomTrackingHandler.cs をアタッチします。
これは、Vuforia のトラッキング状態を Action で通知するためのスクリプトです。
次に、GunScript.cs で Tango の原点の計算を行います。先ほどは一部を省略した状態でしたが、以下が GunScript.cs の全体です。
重要なのは、OnTracking 内で Tango 原点を求めている部分です。originToMarker が HoloLens 原点からマーカーへの変換行列、tangoOriginToMarker が Tango 原点からマーカーへの変換行列、originToTangoOrigin が HoloLens 原点から Tango 原点への変換行列となっています。
Inspector では以下のように設定します。

これによって、TangoOrigin の位置が Tango アプリでの原点の位置に移動され、Gun の位置が Tango の位置と一致するようになります。
アプリの実装内容をすべて書くのは大変だったので、以下の部分は省略しました。ごめんなさい。
Set ボタンが押されたら、Input Field に入力された IP を LLAPINetworkManager.cs の Server Address に設定するようにしました。
Muzzle から Ray を飛ばし、ぶつかったところに黄色いオブジェクトを表示させて照準としています。
Volumetric Lines というアセットを使って光線を作成しました。
風船は MRDesingLabs_Unity の DesignLabs_Unity_Examples に入っているモデルを使いました。
光線と風船の衝突を判定し、風船が割れる処理を行っています。
風船が割れたときに出る紙吹雪は、以下のブログを参考にして作成しました。
出来上がったデモは出現する風船を撃つというだけのものですが、しばらくやっていたくなるような楽しいデモになりました。制限時間や得点などを入れてゲーム性を上げるともっと楽しくなりそうです。
また、今後の発展としては、複数人で対戦したり、現実のものとのインタラクションを入れたりしたいと思っています。
@OculusTan さんによる「VRすきまアワード作品紹介?」です。お楽しみに!
]]>こんにちは、たるこすです。
2016/11/27 から1年間継続を目標として毎週ブログ投稿を始めました。前回の投稿(2017/11/19)で52週連続、そして今回の投稿で53週連続の投稿となります。
1年は52週と1日なので、今回の投稿をもって「1年間毎週ブログ投稿達成!」となりました。
ここから先は、1年間の投稿の振り返りや良かったことを書いていきますが、最初に伝えたいことを2点あげておきます。
1年間で投稿した記事の内訳は以下の通りです。
| カテゴリー | 投稿件数 |
|---|---|
| イベント参加報告 | 5件 |
| Unity, HoloLens | 30件 |
| おうちハック, ガジェット | 7件 |
| Windows関連 | 7件 |
| Android | 2件 |
| その他 | 1件 |
Unity, HoloLens 関連が 30 件とダントツで多く、イベント参加報告も 5件中4件 が 「HoloLens Meetup」 というイベントについてなのでほとんどが HoloLens 関連の記事ですね。
作ったデモ動画をいくつかはっておくので良ければ見てみてください。
また、「ブログの目次」ページに各ブログ記事へのリンクをまとめています。 tarukosu.hatenablog.com
毎週ブログ投稿を始めたのは、発信力をつけたいと思ったからでした。
1年前のことなので正確には覚えていないのですが、「発信力をつけたい」と思った理由として以下のことがありました。

1年前までのブログ投稿は10件くらいだったので、毎週ブログ投稿をよく決意したなぁと思います。1年前の自分に感謝です。
ブログ投稿を始める前は某イカのゲームだけで土日が終わっていたこともありました。ブログ投稿を始めてからは毎週ブログ記事を書かなければいけないので、実装・技術調査・イベント参加など、何かしらの活動を行ってそれをブログ記事にまとめるという活動を行うようになりました。
土日の時間の使い方がかなり変わったと思います。
始めは恥ずかしくてあまりやっていなかったのですが、ブログを投稿したらそれをツイートするようにしていました。リツイートやいいねがもらえると嬉しいですし、リツイートが多いとブログへのアクセス数も多くなりました。
GOROman さんや凹みさんから記事に対してコメントがもらえたこともあり、非常にモチベーションがあがりました。
これいいなあ
— GOROman (@GOROman) 2017年1月16日
[おうちハック]Raspberry Pi 3 と USBカメラで赤ちゃんモニタリングページを作る - たるこすの日記 https://t.co/1r1dd3lpmt
これはかなり面白くて次やりたいと思ってるんですが、家電やガジェットの位置が空間のどこにあるかが(予め登録しておけば)認識できるので、向くだけで音声認識開始するっていうのは誤認識問題に対する1つの解だと思いますhttps://t.co/patqmkk8to#HoloLensJP
— 凹 (@hecomi) 2017年3月25日
これまでで一番リツイートが多かったのが以下のツイートでした。(ブログ投稿についてのツイートではないですが)
ついに"チカラ"を手に入れてしまった... #HoloLens pic.twitter.com/xuFwmY6gW6
— たるこす (@tarukosu) 2017年2月18日
この件は MoguraVR さんにも記事として取り上げていただきました。
前に試した技術をもう一度使いたくなることが時々あります。以前使ったときにメモを書いて残してあればよいのですが、ブログを書く前はなかなか面倒でメモを書くことはほとんどありませんでした。
ブログ投稿を始めてからは、実装中にメモを書くことが増え、ブログ記事を書く段階で誰でもわかりやすいようにさらにメモを整理するようになりました。
検索してヒットする、というのも嬉しいポイントでした。ローカルに残したメモだと、どこに保存してあるのか分からなくてメモを探すのに時間がかかることもありますが、ブログだとググれば出てきます。さらに、仕事中に必要になっても、会社の PC でググれば記事が出てくるので非常に便利でした。
HoloLens 関連の開発が多かったので特に言えることなのですが、ブログ投稿を続けることでデモアプリやデモ動画がだんだんと増えてきました。そうすると、イベントで会った人にデモ動画を見せたり HoloLens を使ってデモができるようになりました。5分間 LT(ライトニングトーク)での発表も何度か行いました。
また、これは仕事関連でブログを始めたことと直接は関係ないのですが、Unite 2017 Tokyo という Unity のイベントで講演することができました。社外で発表する機会が増えた1年になりました。
この一年間で知り合いがかなり増えました。技術系イベント(主に HoloLens Meetup)に参加したことが主な要因ですが、ただ参加するだけではなくプレゼン発表したりやデモを見せたりできたことが良かったと思います。
また、イベントで会った方に「ブログ読んでいます」と言っていただけることもあり、とても嬉しかったです。
自分は飽きっぽい性格で、これまでは何かを決意してもすぐに飽きてやめてしまうことが多かったのですが、ブログ投稿を続けるにあたっては以下の2点を意識しました。
何があっても毎週投稿するというのが大事だったと思います。極端なことをいうと、「あ」とだけ書いて投稿することもできるわけですが、それでも投稿をやめてしまうよりは全然いいと思います。(多分ものすごく恥ずかしいので、来週からは頑張ろうと思うはず)
もし、「今週は忙しかった」などの何かしらの理由をつけて投稿しないという例外を作ってしまうと、投稿しないことへのハードルがかなり下がってしまいます。そうすると、その後も事あるごとに投稿しない週を作ってしまい、そのうちやめてしまうのではないかと思います。
皆さんがそうなるとは限らないですが、自分は絶対にそうなってしまうと思ったので必ず毎週投稿するというのを強く意識していました。
ブログ投稿を続けるために大変だったのが、何についてブログを書くか、というブログのネタを考えることでした。 毎週、平日の間になんとなくネタを考えて、土日で実装とブログ投稿を行うことが多かったです。
実装とブログ投稿にかけられる時間がたっぷりあるわけではないので、実装時間が短くてもブログ投稿できそうなネタを選んで実装を進めるようにしました。また、1週間で終わりそうにない少し大きめのネタであれば、ブログ投稿も数回に分けて行うようにしました。
実装が終わっていても、ブログ記事を書く段階でスラスラ書けるときとそうでないときがありました。 どういったときに書きづらいのかは自分でも良くわからないのですが、ひとつ思い当たるのは知識が少ない分野のブログは書きづらかったです。他の人に読まれるため間違ったことを書きたくないと思い、文章を書くのが慎重になったり書いた文章が正しいかどうか調べたりして、時間がかかりました。
目標としていた1年間を達成したので、一旦毎週投稿は終わりにします。ただ、今後もブログ投稿は続けていきたいと思っているのでよろしくお願いします。
]]>今回は Unity 2017 の新機能である Timeline の勉強がてら、HoloLens でふわっとメニューウィンドウを表示させたいと思います。
ホーム画面で Bloom したときに出てくるメニュー画面のような感じで、アプリ内のメニュー画面を出すというイメージです。
この動きを Unity で Timeline 使って作ってる pic.twitter.com/q4Mayg1i40
— たるこす (@tarukosu) 2017年11月18日
ただし、アプリ内で Bloom を使うとアプリが終了してしまうため、アプリ内のメニュー画面には Bloom は使えません。そのため、ダブルタップ(Air-Tap を二連続で行うジェスチャ)を行うと、メニューを出すようにしてみます。
新規プロジェクトを作成し、HoloToolkit をインポートします。細かいところは省略しますが、HoloToolkit を使って HoloLens 用の設定を行います。
シーンに以下のプレハブを配置します。

メニューウィンドウは MRDesignLabs のボタンを使って作るのが良いかと思いますが、今回は一旦キューブの組み合わせで作ってみました。以下のような構成で、MenuWindow と MenuPanel は空のオブジェクト、Background と Button はキューブのサイズを調整して作成しました。


また、視線の向きにウィンドウが追従するよう、MenuWindow には Tagalong と Billboard を付けました。きれいに追従するように、BoxCollider のサイズと Tagalong の Minimum Horizontal/Vertical Overlap の値を少し変更しています。

メニューができたところで、Timeline を使ってアニメーションを付けていきます。Timeline という機能の詳細について説明はしない(説明できるほど理解できていない)ので、知らない方は以下のサイトやスライドを見てみてください。
www.slideshare.net
Hierarchy で MenuPanel を選択した状態で、Window > Timeline Editor を開き、Create ボタンを押します。

Playable オブジェクトの保存ウィンドウが出るので、名前を入力します。これで、Timeline が作成され、必要なコンポーネントがオブジェクトにアタッチされます。

Timeline が自動再生されないよう、 Play On Awake のチェックは外しておきます。

はじめは、Timeline の AnimationTrack(新しく Timeline を作成するとデフォルトで表示されている)を使って位置や回転のアニメーションを作ろうとしました。しかし、キーフレーム(ひし形マークが表示されているところ)を登録するところまではいいのですが、キーフレームの時刻を調整しアニメーション速度を変更する方法がわかりませんでした。

そこで AnimationTrack は一旦あきらめ、 PlayableTrack という Timeline からスクリプトを実行させる仕組みを使いました。PlayableTrack を使うには、PlayableBehaviour と PlayableAsset を継承したクラスをそれぞれ作成します。今回は、Position, Rotation, Scale, マテリアルのアルファ値 を変更するスクリプトをそれぞれ作成しました。
PositionPlayableBehaviour.cs の ProcessFrame が Timeline で実行されたときに毎フレーム呼ばれるメソッドです。
こちらを参考に 3次関数で開始と終了のアニメーション速度をゆっくりにしています。 appleorbit.hatenablog.com
Rotation, Scale, マテリアルのアルファ値 を変更するスクリプトもほぼ同じです。すべて表示すると長くなってしまうので、リンクをはっておきます。
次は作成したスクリプトを Timeline に追加していきます。PlayableAsset を Timeline にドラッグ&ドロップすると、Track が作成され PlayableAsset が追加された状態になります。Timeline 上で PlayableAsset を選択するとインスペクタに詳細が表示されます。GameObject にアタッチする通常のスクリプトと同じように、ここで GameObject を指定したりパラメータの調整を行います。
また、音声データを Timeline にドラッグ&ドロップすれば、Audio Track が作成されます。Audio Track ではどの Audio Source から音を再生するかを指定する必要があるので、MenuPanel に Audio Source をアタッチしそれを指定しています。
作成したタイムラインは以下のようなものです。

また、それぞれの Asset のパラメータは以下のように設定しました。




次は、作成ウィンドウを開く Timeline を複製し、閉じるアニメーションの Timeline を作成しました。編集したい Timeline は Inspector で Playable Director の Playable で設定していないと Timeline のプレビューができないのでご注意ください。
閉じるアニメーションは開くアニメーションよりは短い時間で動作するようにしています。

設定したパラメータは以下の通りです。




作成した開くアニメーションの Timeline と閉じるアニメーションの Timeline を切り替えて実行するために、以下のスクリプトを MenuPanel に設定します。

また、以下のスクリプトを MenuWindows に設定し、Toggle メソッドを呼ぶとウィンドウが開いたり閉じたりするようにします。

冒頭でも書きましたがアプリ内では Bloom を使えないため、メニューの表示にはそれ以外のアクションを使う必要があります。いろいろな方法がありますが、ダブルタップを使うのが便利です。
ダブルタップは以下のようなスクリプトで認識することができます。
空のオブジェクト(MenuWindowManager) を作成し、上記スクリプトをアタッチします。また、インスペクターで MenuWindows を割り当てます。

これで、ダブルタップでメニューの表示・非表示ができるようになりました。
以下のように、ダブルタップでふわっとメニューウィンドウが表示できるようになりました。メニューのデザインや音はイケてないですが、今回はアニメーションさせることが目的だったのでそこは許してください。
Timeline を使ってメニューウィンドウをアニメーション表示させてみた pic.twitter.com/qrqjgCoZ65
— たるこす (@tarukosu) 2017年11月19日
Timeline は初めてつかってみたのですが、動きや音などを組み合わせて一連のアニメーションを簡単に作ることができました。今後も活用しようと思います。
]]>Windows 10 の「フォト」アプリの新機能 Story Remix (ストーリーリミックス)をご存知でしょうか?
画像や動画からムービーを作ることができる機能で、以下のようなムービーが簡単に作成できます。
Story Remix で作成したムービー pic.twitter.com/1jHWHxa7YI
— たるこす (@tarukosu) 2017年11月12日
かなりすごい機能なのにまったく話題になっていなくて寂しいので、使い方を簡単に紹介したいと思います。
まずは、ムービーの素材となる画像や動画が必要です。普段は息子の写真や動画を使っていますが、今回はデモ用に猫の映像を使います。以下のサイトから、動画と画像をそれぞれダウンロードしました。
フォトアプリを立ち上げ、左上の「コレクション」を選択すると画像や動画の一覧が表示されます。

ここに表示される画像は、「フォルダー」メニューで設定したフォルダに含まれているものになります。表示するフォルダを追加するには「検索する場所を選択する」をクリックして設定してください。

素材として使う画像や動画は「フォルダー」メニューで設定されているフォルダに移動するか、画像や動画があるフォルダを追加するかして、「コレクション」での一覧に表示されるようにしてください。
左上のメニューで「コレクション」または「作品」を選択すると、右側に「作成」というメニューが表示されます。「作成」をクリックし、さらに「ビデオのリミックス」をクリックします。もし、これらのメニューが表示されない場合は「フォト」アプリのアップデートを試してみてください。

まず、リミックスに使う素材の選択です。使いたい画像や動画にチェックを入れ、「追加」ボタンを押します。

なんと、これだけで自動的にムービーが作成されてしまいます。映像の切り替えはちゃんと曲のタイミングに合わせてくれます。

自動リミックスで作られたムービー(音が出ます) pic.twitter.com/z7SeBUdCNq
— たるこす (@tarukosu) 2017年11月12日
気に入らない場合は「自動リミックス」ボタンを押すと、別のアレンジでムービー作成をやり直してくれます。
自動で作成されたムービーをベースに、手動で修正を加えることもできます。「ビデオの編集」ボタンを押すと、編集画面が表示されます。

編集画面では以下のことが行えます。
「3D 効果」というのが Story Remix 最大の特徴だと思うので、詳しい使い方を紹介します。それ以外の機能はそれほど複雑ではないので、試してみれば使い方はわかると思います。
「3D 効果」は動画素材のみに使える機能で、動画に 3D のエフェクトを付け加えることができます。エフェクトを付けたい動画を選択し、「3D 効果」をクリックすると編集画面が表示されます。
2017/11/12 時点では、55 種類のエフェクトが用意されていました。エフェクトには、画面全体に表示されるものと、画面の好きな箇所に表示できるものがあります。(今のところ、どちらのパターンなのかは試してみるまで分かりません)
ここでは、「風船」というエフェクトを使ってみます。右側のエフェクト一覧から「風船」をビデオ内にドラッグ&ドロップすると、エフェクトが追加されます。


この状態で下の再生ボタンを押すと、以下のようになります。風船は画面内の決まった位置に表示されているというのがわかると思います。
3D効果のテスト
— たるこす (@tarukosu) 2017年11月12日
ポイントへのアタッチなし pic.twitter.com/iwKbNScZsO
ここで、右側の欄の風船のエフェクトで「ポイントへのアタッチ」をオンにし、いかりマークを猫の頭の位置に置きます。

こうすると、以下のようになります。
3D効果のテスト
— たるこす (@tarukosu) 2017年11月12日
ポイントへのアタッチあり pic.twitter.com/PPpn7mUsJv
これ、すごいですよね!
猫が動くのに合わせて風船の表示される場所が移動しているのがわかると思います。
ポイントへのアタッチを使うと、いかりのマークを付けた所のものや場所をトラッキングして、その位置との相対位置を保つようにエフェクトが表示されます。動きが早すぎたり特徴が少なすぎたりするとうまくいかないこともありますが、基本的には何に対してもアタッチさせられます。
先ほどの 3D 効果に加え、動画のトリミング位置や文字の表示などを変更することで、冒頭で紹介したムービーが完成しました。
Story Remix で作成したムービー pic.twitter.com/1jHWHxa7YI
— たるこす (@tarukosu) 2017年11月12日
今回紹介した Story Remix が発表されたのは Build 2017 というマイクロソフトのイベントだったのですが、そこで紹介されていたデモでは「Remix 3D」で公開されている 3D モデルを利用できていました。2017/11/12 時点ではその機能はまだ利用できませんでしたが、そのうちアップデートされて利用できるようになるでしょう!
今後のアップデートにも期待したいと思います。
]]>こんにちは、たるこすです。
ついに、Wii リモコンを HoloLens のコントローラとして使えるようになりました。
この記事では、デモ動画と実装の仕組みを紹介します。
まずはデモ動画をご覧ください。
Wii リモコンを向けた方向にカーソルが移動し、Wii リモコンの B ボタン(背面のトリガー)を押すことでオブジェクトを選択できるようになりました。
以下のサイトの Prerequisites 欄に書かれていますが、2011年11月以降に製造された Wii リモコン は Microsoft 標準の Bluetooth ドライバでは接続できません。
手元にあった Wii リモコンは Wii U を買ったときについてきた新しいものなので、HoloLens と直接接続することはできませんでした。古い Wii リモコンであればもしかしたら接続できるかもしれないので、もし持っている方は試してみてください。

今回は、Wii リモコンは PC と接続し、PC 側で値を読み取って HoloLens に送ることにしました。
以下の記事にもまとめましたが、Wii リモコンはセンサーバー(実際にはセンサーではなく両端に赤外線 LED がついているもの)と組み合わせることで、Wii リモコンを向けている位置を取得することができます。
今回は、Wii リモコンのポインタ位置と A,B ボタンの入力を PC で受け取って HoloLens に送っています。
PC と Wii リモコンを接続し、値を読み取るところまでは以下の記事にまとめています。
上記記事で利用している Unity-Wiimote のサンプルシーンをベースにして、変更を加えていきます。
HoloLens へのデータの送信は、HoloToolkit の Sharing を使っています。HoloToolkit に Prefab として入っている Sharing をシーンに配置します。

Wii リモコンの値の上記記事で利用している Unity-Wiimote のサンプルシーンに Wii リモコンの値を読み取るコードが入っているので、そちらを参考に以下のスクリプトを作成しました。
また、値の送信用に WiimoteMessages.cs を作成しました。こちらは HoloToolkit に含まれる CustomMessages.cs をベースに変更を加えたものです。
これら2つのコードを空の GameObject にアタッチします。
プロジェクトを作成し、MixedRealityToolkit-Unity(HoloToolkit-Unity) と MRDesignLabs_Unity をインポートします。
まずは、 HoloLens, Sharing プレハブを配置します。

Wii リモコンから得られるポインタ位置は、センサーバーをモニターの下に置いた際のモニター上の 2D の位置になります。これを HoloLens で使うためには、HoloLens の座標系での位置に変換する必要があります。そこで、モニターに 2D のマーカー画像を表示し、Vuforia をつかってマーカー位置を認識することでモニターの位置を認識させます。
HoloLens で Vuforia を使う方法については、以下の記事にまとめています。
ImageTarget の子要素として、操作対象とするオブジェクトとスクリーン位置を表す Quad オブジェクトを配置しています。モニターに映ったマーカー画像を認識すると、ImageTarget の座標がマーカーの位置に移動し、子要素もそれに合わせて移動します。


空の GameObject を作成し(名前は WiiMote)ReceiveWiimote.cs と WiimoteMessages.cs をアタッチします。

WiimoteMessages.cs は PC 側アプリで使ったものと同じです。
ReceiveWiimote.cs は以下のようなスクリプトで、PC から送られてきた 2D のポインタ位置から、Wii リモコンの位置姿勢を推定し WiiMote オブジェクトの位置姿勢を変更しています。
まず、2D のポインタ位置と 3D のモニターの位置姿勢(Vuforia を使って設定した Quad オブジェクトの位置姿勢)を使って 3D のポインタ位置を計算します。そして、WiiMote オブジェクトの位置は HoloLens の現在位置の 40cm 下に(かなり適当な値ですが)、姿勢は transform.LookAt を使って 3D のポインタ位置を向くようにしています。
最後に、先ほど作成した WiiMote オブジェクトの位置姿勢を使ってカーソルを移動させるようにします。WiiMote オブジェクトの子要素として、WiiMoteInput オブジェクト(空の GameObject) を作成し、以下のスクリプトをアタッチします。

作成した WiiMoteInput をカーソルに利用するようにします。
HoloLens > FocusManager > HoloLens Focuser を Inspector で表示し、Input Source に WiiMoteInput を設定します。


次に、MRDesignLabs に含まれる InputSources.cs を編集し、以下のフィールドを付け加えます。
public InputSourceWiiMote wiiMote;
これにより、HoloLens > InputMapping を Inspector で表示したときに、InputShellMap の Input Sources 欄に Input Source Wii Mote が表示されるようになります。


以上で HoloLens 側のアプリは完成です。
アプリの実行は以下のような手順で行います。
再度デモの映像を貼っておきます。
Wii リモコンを使った操作は HoloLens 標準の操作方法 (Gaze, Air-Tap) に比べて直感的で使いやすいと感じました。センサーバーの配置や PC 側の準備が必要だったり、センサーバーがある方向にしか使えないという問題はありますが、展示コンテンツでは十分活用できそうです。
センサーバーの LED の間隔を広くして遠めに配置すれば Wii リモコンを動かして認識される範囲が広くなるはずなので、是非試してみたいと思っています。
]]>こんにちは、たるこすです。
ここのところ、Wii リモコンを HoloLens のコントローラとして使おうとしています。
前回はセンサーバーの自作方法について紹介しました。
今回は Unity で Wii リモコンの入力を受け取る方法についてです。
Wii リモコンは Wii U を買ったときについてきた Wii モーションプラスコントローラを使っています。
以下のサイトの Prerequisites 欄に書かれていますが、2011年11月より前に製造された Wii リモコン は Microsoft 標準の Bluetooth ドライバで接続できるそうです。ですが、それ以降の Wii リモコンはMayflash Wireless Sensor のようなものを使うか、東芝の Bluetooth ドライバを使う必要があるようです。
今回は、東芝の Bluetooth ドライバを使うことにしました。そのために、東芝の Bluetooth ドライバを採用している Planex の BT-MicroEDR2X を購入しました。 付属の CD にドライバが入っています。
インストールを行い、Bluetooth 設定を開くと、以下のようなウィンドウが表示されます。

Wii リモコンの 1 ボタンと 2 ボタンを同時押しし、ペアリング待ち状態にしたうえで、左下の新しい接続をクリックします。
接続設定はカスタムモードを選択します。


以下のように Bluetooth 機器として見つかったら、それを選択して「次へ」を押します。

あとは「次へ」や「OK」を押していけば接続が完了します。
うまく接続されれば、以下のように緑と黄色の線がつながったようなアイコンが表示されます。

以下のサイトから、Touchmote をダウンロードします。
私は 64bit 用のインストーラをダウンロードしました。exe を実行するとインストールされます。
PC と Wii リモコンが Bluetooth 接続された状態で TOUCHMOTE を起動すると、以下のようなウィンドウが表示され Wii リモコンが接続されていることがわかります。

この状態で、センサーバーに向かって Wii リモコンを動かすと丸いカーソルが表示され、A ボタンを押すとスクロール B ボタンを押すとクリックができます。
Wii リモコンの入力を PC への入力に対してどのように割り当てるかは、コンフィグで設定することができます。Settings を開き、「CONTROLLER CONFIG」をクリックすると設定画面が表示されます。
デフォルトでは Default, Mouse pointer, Steering Wheel の 3 つのレイアウトが定義されていますが、既存のレイアウトの設定変更や新しいレイアウトの追加も行えます。

HoloLens 用の入力に使う場合には、Touchmote ではなにも操作してほしくないため、何もしないためのレイアウトを作成します。
以下のようにすべての入力を Disable に紐づけています。また、"Available in Layout Chooser" にチェックを入れておきます。こうすることで、Wii リモコンの HOME ボタンを 3 秒間長押しした際に出てくるレイアウト選択メニューで、作成したレイアウトを選択できるようになります。

Unity-Wiimote という Unity で Wii リモコンの入力を受け取れるプロジェクトが公開されています。
release ページに zip がありますが、ここに含まれている unitypackage はサンプルシーンが入っていないので、リポジトリをクローンして使ってみます。
クローンしたら Unity で開きます。Unity のバージョンは 2017.1.2f1 を利用しました。
Scene という名前のサンプルシーンを開くと、以下のように Wii リモコンと黒い板が表示されました。

実行し、"Find Wiimote" ボタンを押すと Wii リモコンの入力(押されているボタンとポインタ位置)が表示されます。


ただし、Unity Editor で実行する際は、起動する順序にコツがいりました。Touchmote は一旦終了させ、先に Unity を実行して "Find Wiimote" を押します。そのあと Touchmote を起動します。この順序で起動させないと、Wii リモコンのポインタ位置が Unity 側でうまく取得できませんでした。
アプリをビルドして実行した際はこの問題は起きず、Touchmote は起動させたままで大丈夫でした。
実行時は以下のような感じです。緑色の点がポインタの位置、白い2つの点が Wii リモコンから見えているセンサーバーの LED の位置です。
次は、当初の目標通り Wii リモコンを HoloLens のコントローラとして使いたいと思います。
]]>こんにちは、たるこすです。
今回は Visual Studio Code で Emacs キーバインドを使う方法についてです。
以前、以下の記事で「Emacs Keymap」をインストールすれば良いと書いたのですが、久しぶりに調べてみると状況が変わっていたので改めて記事を書きたいと思います。
「Emacs Keymap」は hiro-sun という方が作成された拡張機能ですが、リポジトリを見てみると 2016/11/10 で開発が止まっています。
そこで、「Emacs Keymap」をフォークしているリポジトリの更新状況を見てみます。 github.com
そうすると、こちらのリポジトリが活発に更新されているようです。 github.com
VSCode の拡張機能でも「Emacs Friendly Keymap」という名前で提供されています。

「Emacs Friendly Keymap」をインストールしたら、「Emacs Keymap」は無効化もしくはアンインストールしてしまいます。
「Emacs Friendly Keymap」の説明を見ると、オリジナル (hiro-sun さんの Emacs Keymap) と比べて以下の変更があると書かれていました。
そのほかにもいくつかのキーバインドが追加されているようです。
「Emacs Friendly Keymap」で設定されていないキーバインドがある場合、リポジトリに Pull Request を送るのが正攻法ですが少しハードルが高いです。そこで、キーボードショートカットの設定でキーバインドを追加してみます。
ファイル > 基本設定 > キーボードショートカット と選択することでキーボードショートカットのタブを開きます。

タブが開いたら keybindings.json のリンクをクリックします。

今回は、以下のように編集し、キーバインドを設定しました。
「Emacs Friendly Keymap」は基本的な Emacs キーバインドはほとんど使えるようになっています。是非使ってみてください。
]]>こんにちは、たるこすです。
少し前に久しぶりに Wii U で遊んだのですが、その時に Wii リモコンを HoloLens のコントローラとして使えると面白いなぁと思ったので挑戦してみようと思います。
まずは下準備として、 Wii が無くてもセンサーバーを使えるようにするため、センサーバーを自作してみました。
センサーバーとは、Wii リモコンを向けた場所を認識するためのもので、モニターの上や下に設置して使います。

"センサー"と名前についてはいますが実際にはセンサーバーからは赤外線がでているだけで、受光部はリモコン側についています。純正のセンサーバーには左右それぞれ 5 つずつ LED がついていますが、自作する場合には左右に少なくとも 1 つずつの LED を設置すればセンサーバーとして機能するようです。
以下のものを用意しました。(といっても全部家にあったので新しく買う必要はありませんでした。)
なんでも OK

配線用にこんな感じのものを利用

サンハヤト ジャンプワイヤキット SKS-140 単線タイプのワイヤのセット品
電源モジュールへの電源供給用
スマホを充電用でよく使われる、USB が刺さる AC アダプタ
akizukidenshi.comhttp://akizukidenshi.com/catalog/g/gI-04311/
部品を準備してしまえば、あとは簡単です。ブレッドボードに部品をさしていきます。
まずは電源モジュールをブレッドボードに刺し、5V → 赤外線 LED → 75Ω抵抗 → GND と配線します。LED には向きがあるので注意してください。また、違う部品を使う場合には、LED への電流量を考えて適切な抵抗を計算して使用してください。

もう片方の LED も同様に配線します。

これで完成です。電源をつなぎ、電源モジュールのスイッチを押して電源モジュールの LED が点灯すれば OK です。 赤外線は肉眼では見えないので、赤外線 LED から光がでているかどうかはカメラで確認するのが便利です。
ただし、今回はじめて知ったのですが、スマホの外側カメラには赤外線をカットするフィルターが入っているようで、内側カメラと外側カメラで見た際に見え方に違いがあります。
Nexus 5 では外側カメラだと光が弱く、内側カメラだと明るく光って見えました。
iPhone 5S では外側カメラだと光っていないように見え、内側カメラだと光って見えました。
はじめはこのことを知らなかったので、外側カメラで見て光っていないと思いしばらく悩みました。


Wii を起動 (Wii U の場合は Wii モードを起動)し、リモコンを自作センサーバーに向けて動かしてみます。画面のポインタが動けば OK です。
まずはお試しで作ったので赤外線 LED 2つの幅が狭く Wii リモコンを動かせる幅が狭かったのですが、LED を離して設置すればリモコンを大きく動かしても認識できそうです。
]]>こんにちは、たるこすです。
ついに HoloLens とルンバ(Roomba)を組み合わせた HoloRoomba が動くようになりました! くまちゃんを乗せることにより見た目もかわいくなっています。
まずは動画をご覧ください。
Roomba(とラズベリーパイ)だけでも移動はできますが、部屋の中のある場所に自動で移動するというのは難しいです。そこで、HoloLens を使います。HoloLens は空間の 3D マップを作成しその中で自分がどこにいるのかというのを把握できるため、現在地と目的地の差分から移動方向を決めてルンバに指令を送り、目的地に移動することができます。というわけで、約 40 万円で自律移動ロボットを作ることができます。
また、HoloLens の映像を見ながら人が操縦できるようにすれば、遠隔地から操縦して部屋の中を動き回ったり AR 戦車ゲームのようなこともできそうです!
ルンバは通常の掃除用のものを使っています(ルンバ 622)。カバーを外し、ジャンパワイヤと USB シリアル変換アダプター を使って Raspberry Pi に接続することで、コマンドを送って動作させられるようになります。
詳しくは以下のブログ記事に書いています。 tarukosu.hatenablog.com
次に、Raspberry Pi 上に Web サーバを立て、WebSocket を使って移動の指示を受け取れるようにします。
詳しくは以下のブログ記事に書いています。 tarukosu.hatenablog.com
Unity で HoloLens アプリを作成しました。
以下の動画のように、空間をタップすることで目的地を設置します。
アプリ内のメニューで "Start" ボタンをタップすると移動が開始されるので、素早く HoloLens をルンバの上に置きます。
ルンバの移動方向は、HoloLens の現在位置と目的地の差分から決定します。HoloLens の前方向と、現在位置から目的地への方向の間の角度を算出し、角度が大きければ目的地が正面を向くように回転させます。角度が小さくなれば、前方への移動と回転を同時に指令します。スクリプトでは以下のようになっています。
上のスクリプトに出てくる RoombaWebSocketController は WebSocket を使って Raspberry Pi に指示を送るためのクラスです。HoloLens で WebSocket を使う方法は以下の記事に書いているので、気になる方はご覧ください。
「ヒミツのくまちゃん」というぬいぐるみのようなおもちゃが売られています。イヤフォンジャックから音を流すことで、くまちゃんが体と口を動かしながら音を出してくれます。

こどもクラブ ヒミツのくまちゃん シャーベットピンク 2930012 85827
流す音声は Raspberry Pi で Open JTalk を動かして音声合成しました。
次は、Microsoft の Immersive Device (VR ヘッドセット) を使って、遠隔地から HoloRoomba を操縦できるようにしたいと思っています。
]]>こんにちは、たるこすです。
最近 HoloLens を使って Roomba を操縦しようとしているのですが、その際に HoloLens で WebSocket を使えるようにしたので、その方法についてまとめようと思います。
Unity Editor で実行する場合と HoloLens 上 (UWP) で実行する場合で実行環境が違っており、通信周りの API が違うため同一のコードは動きません。そこで、それぞれの環境に向けて、WebSocket 用ライブラリを作成します。
以下のブログを参考にさせていただきました。
以下の記事のとおり、websocket-sharp をビルドします。 qiita.com
作成した websocket-sharp.dll を Unity に読み込み、以下のように Inspector で Editor でのみ利用するように設定します。

始めは冒頭で紹介したブログで紹介されている以下のリンク先のコードを使ってみたのですが、私の環境だとなぜか WebSocket の接続がすぐに切れてしまいました。 github.com
別のコードを探したところ、以下のリポジトリが見つかりました。
リポジトリに含まれている UwpWebsocket.cs を Unity にインポートするだけで利用できます。
UwpWebsocket.cs が websocket-sharp のメソッド名にあわせてくれているため、利用する側はコードを共通化することができます。
かなり省略していますが、以下のようなコードで WebSocket を使うことができました。
using WebSocketSharp; ... class RoombaWebSocketController : MonoBehavior { ... WebSocket websocket; ... public void Connect(){ websocket = new WebSocket(uri); websocket.ConnectAsync(); } public void Disconnect() { websocket.Close(); } public void SendCommand(string msg) { if(websocket != null && websocket.IsAlive) { websocket.Send(msg); } } ... }
@dy_karous さんから以下の情報をいただきました。ありがとうございます!
]]>UWPでWebsocketを使うならば、MS純正のMessageWebSocketかWebSocket4Netなんかもおすすめです。https://t.co/a9AEYZPYdu https://t.co/wLFS7CBZJS
— d_yama (@dy_karous) 2017年10月1日
今回は Raspberry Pi にルンバ操縦用のサービスを立て、PC やスマホから操作する方法について紹介します。
ブラウザからコントロールできるようになった! pic.twitter.com/wIK613ofsl
— たるこす (@tarukosu) 2017年9月10日
今回紹介するコードは、以下のリポジトリで公開しています。
使うためには、Raspberry Pi で以下のコマンドを実行してください。
リポジトリのクローン
$ git clone https://github.com/tarukosu/RoombaRPC.git
サブモジュール(ルンバコントロール用ライブラリ)のセットアップ
$ git submodule init $ git submodule update $ touch roomba/__init__.py
依存パッケージのインストール
$ apt install python-dev $ pip install pyserial $ pip install zerorpc
RPC サーバの起動
$ python server.py
操作用 Web サービスのセットアップ
(RPC サーバとは別のコンソールを開いて) $ cd server $ sudo apt install libzmq-dev $ npm install $ npm -g install bower $ bower install virtualjoystick.js
app.js, index.html 内のIPアドレスをRaspberry Pi の IPアドレスに書き換え
Web サーバの起動
$ node app.js
npm install の際に zmq のインストールに失敗する場合は、以下のページが参考になるかもしれません。
zerorpc という ZeroMQ と MessagePack を使った RPC ライブラリを利用しました。
Raspberry Pi で動作するサーバのコードは以下のようになります。
RoombaRPC クラスで定義したメソッドが、zerorpc を使ってマシン内の別サービスや別のマシンから呼び出せるようになります。
virtualjoystick.js というライブラリを使い、ブラウザ上でジョイスティックのような操作ができるようにしました。操作された際の値は websocket を使ってサーバ側に送信されます。サーバ側では受け取った値を引数とし、zerorpc を使って RPC サーバにコマンドを送ります。
次回は HoloLens を使って Roomba を自律移動させるというホロルンバを紹介します。
]]>youtube で動画が公開されているので、ぜひご覧ください。 www.youtube.com
前半のセッションについて、簡単に振り返ってみます。
例のハッカソンで作られた Artgram という HoloLens アプリの機能として、音声認識による画像検索を作られた話です。
HoloLens の標準音声入力は英語のみなので、日本語の認識ができません。そこで、クラウド音声認識サービスを利用したとのことです。
主な音声認識サービスとして Google のものと Microsoft のものがあったが、UWP(HoloLens) からストリーミング音声認識サービスを使うなら、実装の都合上 Bing Speech API のほうが楽だとのことです。
ハッカソンでは実装しなかったが、WebRTC を使って API に常時接続すれば、リアルタイム音声認識もできるようになるはずとのことです。
短期間の実装のため、音声認識に合わせて Microsoft Bing Image Search を利用。
Unity と Microsoft API の連携であれば、実装例があるはず…
ただし、HoloLens 上で動かすには Castle Windsor というライブラリに依存しているところを削除する必要がある。
ライブデモで、「とある魔術の禁書目録」という言葉を認識し、検索した画像の表示が行えていました。
これからの UI として音声入力は非常に重要になって来そうなので、自分でも音声認識を試してみたいと思います。
ちびっこにかっこよく見られたい! ということで、指パッチンエアタップの講習がありました。
HoloLens を初めて試す人にエアタップを教えるときは「親指と人さし指をくっつけて離す」というのがわかりやすいとのこと。それを進化させ、中指で音を鳴らしつつエアタップするのが指パッチンエアタップです。
また、以前澤さんもおっしゃっていましたが、ゲイズ(視線カーソル)を合わせてから腕を上げてタップするのがかっこいいとのことです。
PCを背負って WinMR を装着し、Insta 360 one(全天球カメラ)を自撮り棒にとりつけて自身を撮影します。Insta 360 one の映像と WinMR の映像を組み合わせると一人でデモ動画を撮影できます。
GoPro などでも自撮りはできますが、Insta 360 one を使うと撮影時に画角やフレーミングを気にしなくてよく、後から編集できるので楽だそうです。
下記の2つのアセットが DLL を使っており、 UWP に対応していない
残念ながらスタッフの作業で講演を聞くことができませんでした。後で動画で見ようと思います。
後半の LT のコーナーで、Meetup vol.2 以来となる LT 発表をしました。時間の都合上、ほとんどデモ動画を見せるだけになってしまったのですが、実装の詳細は過去のブログ記事に書いているので良ければご覧ください。
HoloLens Meetup 初参加という方も多く、公演の合間の休憩時間の HoloLens デモは非常に盛り上がっていました。今後は Immersive Device から Windows Mixed Reality を始めるという方が増えてくると思うので、そういった方を巻き込んでコミュニティがどんどん盛り上がってくると嬉しいです。
]]>ブラウザからコントロールできるようになった! pic.twitter.com/wIK613ofsl
— たるこす (@tarukosu) 2017年9月10日
ルンバと Raspberry Pi の接続については、こちらの記事を参考にさせていただきました。
また、上記記事でも書かれている通り場合によってはルンバを壊してしまう可能性があるため、試される方は自己責任でお願いします。
Amazon で調べて安そうなものを購入しました。900番台のルンバは有線での通信ができないそうなのでご注意ください。

【国内正規品】 iRobot ロボット掃除機 ルンバ 622 ホワイト
棚の中で眠っていた Raspberry Pi 3 を使いました。
Raspberry Pi3 Model B ボード&ケースセット 3ple Decker対応 (Element14版, Clear)-Physical Computing Lab
Raspberry Pi 3 用です。
")
この変換アダプターを使うことで、Raspberry Pi 側は USB で接続することができます。
USB シリアル変換アダプターと Raspberry Pi との接続に1本、Raspberry Pi への給電に1本必要です。

ルンバと変換アダプターとの接続にオス-オスの普通のジャンパワイヤを3本使います。
Raspberry Pi への給電用として使います。
 iPhone&Android対応 *2017年9月時点")
Anker PowerCore 10000 (10000mAh 最小最軽量 大容量 モバイルバッテリー) iPhone&Android対応 *2017年9月時点
詳細は省略しますが、新しく Raspberry Pi を購入した場合は OS のインストールが必要です。今回は、以前インストールしていた Raspbian という標準の OS を利用しています。
まず、ルンバ上面のカバーを取り外します。ダストボックスを取り外し、取り外したあたりからカバーを上に持ち上げたらガコッと外れました。


まず、USB シリアル変換アダプターが 5V の設定になっていることを確認してください。

USB シリアル変換アダプターの RX, TX, GND にそれぞれジャンパワイヤをさします。

ルンバ側は、中段左に変換アダプターの TX からのワイヤ、中段右に RX からのワイヤ、下段中央に GND からのワイヤをさします。


最後に、USB シリアル変換アダプターと Raspberry Pi を USB ケーブルで接続します。
Raspberry Pi で以下のコマンドを実行し、デバイス名を確認します。 私の場合は /dev/ttyUSB0 で認識されていました。
$ ls /dev/tty*
しかし、以下のように権限を確認すると、一般ユーザに Read Write 権限がありません。
$ ls -l /dev/ttyUSB0 crw-rw---- 1 root dialout 188, 0 9月 9 20:54 /dev/ttyUSB0
そこで、 /etc/udev/rules.d/50-udev-default.rules を作成(すでにある場合は編集)し、以下の行を記入します。
KERNEL=="ttyUSB[0-9]*", GROUP="dialout", MODE="0666"
USBケーブルを抜き差しすると、以下のように権限が変更されました。
$ ls -l /dev/ttyUSB0 crw-rw-rw- 1 root dialout 188, 0 9月 9 21:05 /dev/ttyUSB0
この部分は、以下のページを参考にしました。
上記PDFの仕様を読んでコマンドを送信することも可能ですが、以下のライブラリでコマンドをラップしてくれているのでこれを使います。
リポジトリのクローンと pyserial のインストールを行います。
$ git clone https://github.com/martinschaef/roomba.git $ pip install pyserial
roomba フォルダ内で以下のスクリプトを作成し、実行します。
うまくいけば、センサの値が表示されルンバが少し回転します。
また、roomba に含まれる starwars.py を実行すると、ダースベイダーのテーマが演奏されます。
このライブラリに入ってたサンプルプログラム(音楽の演奏)を動かしてみたhttps://t.co/j6rkcmiTH8 pic.twitter.com/EKMWasv3mi
— たるこす (@tarukosu) 2017年9月9日
今回のブログは一旦ここまでとして、次回はこのライブラリを使って遠隔から操縦できるようにしていきます。
]]>HoloTooliitのバージョンやUNET対応などでパッケージが分かれているようです(UNET対応版の1.5.7.2は未検証です)。


1.5.7.0でCalibrationアプリでカメラ画像が出ないことがあります。

解決方法を教えてもらったので記録しておきます。
DeckLingManager.cppの72行目あたり
videoDisplayMode = bmdModeHD1080p5994
これを
videoDisplayMode = bmdModeHD1080i5994
にすると動作します。または「1080p」などに該当する部分を環境に合わせて変更します。
SpectatorViewの環境を作るときはGoPro HERO 5とBlackmagic Intensity Shuttle USB 3.0を使うことが多いのですが、Blackmagic Intensity Shuttle USB 3.0が1080pに対応しておらず1080iのみでしか出力できないためと思われます。リファレンスのIntensity Pro 4K Captureは1080pに対応しています。

【国内正規品】 GoPro ウェアラブルカメラ HERO5 Black CHDHX-501-JP

Blackmagic Design キャプチャーカード Intensity Shuttle for USB 3.0 000856
スライドはこちら。
Xtion2やOpenNI2、NiTE2の概要と、KinectやRealSenseでの事例です。内容的には数年前のおさらいです。
2013年にPrimeSenseがAppleに買収されたことで、XtionやOpenNIがクローズされました。その時期からASUSとしてはXtion2のセンサーを探していたそうで、やっと今年製品としてリリースすることができたそうです。
センシング形式はToF、チップはTIを使っています。
流通はは来週あたりから開始されるとのこと。
Kinect v2やRealSenseとの仕様上の性能比較は下記の通りです。
センサー性能的にはKinect v2、サイズ的にはRealSenseに近くなっています。


特長を下記に列挙します。
購入にあたっての注意事項も列挙します
点群精度についてはかなり微妙な感じがします。。。
発表会でASUSの製品担当の方もいたのでフィードバックしました。せっかくOpenNIを使える環境が復活したので、今後の改善に期待したいです。
Depth画像は、かなりきれいに取れています。

点群については、状況確認中です。
PLYで落としてみた。
— 中村 薫 (@kaorun55) 2017年4月27日
正面から見ると良さそうなんだけど、横からみると波うってる気がする。 pic.twitter.com/KcHmNRvm8L
天井と壁もとってみたけど、やっぱりもう一声欲しいところ。 pic.twitter.com/VvYZNVnWxd
— 中村 薫 (@kaorun55) 2017年4月27日
]]>PCLのビューアーで出してみた(左側はカーテンです) pic.twitter.com/9spYjmbWM2
— 中村 薫 (@kaorun55) 2017年4月27日
Windows Mixed Realityヘッドセットについて「HoloLens互換」や「廉価版HoloLens」という言い方をされることがありますが、基本的には別物と考えた方が良いです。
互換があるとすれば「HoloLensと同じ排他の3DアプリがUWPで動作する」くらいです。ソフトウェア開発では近いところにいますが、ハードウェアや体験については別々にと思った方が間違いありません。

製品としては「Mixed Realityヘッドセット」ですが、ドキュメントでは「Immersive(イマーシブ:没入)ヘッドセット」と記載されており、Oculus RiftやHTC ViveなどVRヘッドセットに近いです。
ドキュメントにある機能的な違いを下記表にしました。


HoloLens同様Unityでの開発が中心となります。
開発環境はこちらのfor immersive headsetsを参照。
概要としては下記です
AcademyはMRヘッドセット対応しており、Mixed Reality 250が追加され、HoloLensとMRヘッドセット用アプリのSharingを学べます。
HoloLensのARだけでなくMRヘッドセットでVR環境もできるようになりました。 MRヘッドセットはシースルーやジェスチャーがないなどHoloLensと体験の違いはありますが、PC接続のためHoloLensよりも高負荷をかけられることがメリットになります。
年末にリリースが予定されているモーションコントローラーが出てからが本番ですね。

順番は話の流れ。
HoloLensを買えば実現できる基本的な事例ですが、いままでだと研究対象にもなっていた事例です。
HoloLensを装着した人とPCの人ととのSkypeで、HoloLens装着者の視界が見えるので遠隔でサポートできます。ここでは簡単なSkype単体を使った電気工事の事例ですが、あとで紹介するthyssenkruppのエレベーターのようにアプリに組み込んで(おそらく独自に実装して)業務のサポートツールとして使うこともできます。
表示するモデルの大きさに対する流れの作り方、センサーデータのシミュレーションの話をするときに使っています。
動画ではわかりづらい重要な要素がいくつかあります。
IoTやDeep Learning/Machine Learning、スマートグラスと話をつなげるときに使っています。
いくつかの要素の複合体です。
HoloLensを使った計測事例です。計測や精度の話をするときに使っています。
キッチンのリフォームシミュレーションです。実際に店舗でも使われているようです。
店舗訪問前、店舗見学中、店舗側の情報解析の3つに分かれており、ビジネス的な要素がかなり強いです。
今現在引き合いの多い建築向け動画です。
BIMや3D CADで設計した建築データを、建築中の場所に重畳させる、配管を通してメンテナンスに活用するといった、3D CADデータをより長期的に活用する方法について示されています。
こちらも建設向け動画です。
建設対象のモデル、工程、記録などがすべてHoloLens内に入っています。
橋のスケーリングを変更できるので、設計データと実際の建設物との大きさのイメージがリンクされるので教育目的への活用も期待できます。
さまざまな要素により現在の実現は難しいですが、よく話にでます。
リルタイムで3Dデータを再構築し、遠隔コミュニケーションに使用します。
より現実的なところで3D動画です。
HologramsのバレリーナやBuild 2017でのシルクドソレイユのパフォーマンスなどに使われています。
後処理型ですが、各フレームごとにメッシュ情報とテクスチャを持っており、3Dの動画といえる状態になっています。
おおよそ上記の動画で説明しています。
分野もさまざま用途のさまざまですが、分野にとらわれず要素を分解して組み立てると多くの方面に使えると思っています。
]]>
7/15(土)に「Tokyo HoloLens ミートアップ vol.4」を開催しました。 hololens.connpass.com
今回はスタッフ含めて146人の参加となり、前回よりも多くの方にお越しいただけた印象です。 また試験的に司会など担当をいままでと変えてみました(直前にいろいろありましたが、元々そういう話をしてました)。
スタッフとして参加してくれた方も20人ほどとなり、ミートアップ以外にできることも模索していこうと思います。
同日、となりのセミナールームBにて「第1回 IPABセミナー Mixed Realityとその産業応用」も開催されており、ぼくはそちらにてHoloLensの概要のお話をしていました。
第1回 IPABセミナー Mixed Realityとその産業応用 — IPAB
こちらは参加者が大学の先生などアカデミックな方だったので、ミートアップとはまた違った話ができました。 途中でセミナー参加者の方にもミートアップを覗いてもらい雰囲気を体感してもらいました。
とはいえ、Device PortalのFile Explorerからアクセスできる方が何かと便利なので、必然的に「カメラロール」、「ドキュメント」、「アプリのローカルフォルダ」の3種類になると思います。

それぞれの特長をまとめます。これらを踏まえて決めればよいかと思います。
こちらのリポジトリに置いています。
カメラロールへのファイル書き込みサンプルです。
// カメラロール // ピクチャライブラリの権限が必要 // フォルダは作れない { var file = await KnownFolders.CameraRoll.CreateFileAsync("test.txt", CreationCollisionOption.ReplaceExisting); using (var stream = await file.OpenStreamForWriteAsync()) { var bytes = System.Text.Encoding.UTF8.GetBytes(@"テストてすとtest"); await stream.WriteAsync(bytes, 0, bytes.Length); } }
権限はUnityエディター上で「PuctureLibrary」をチェックします。

UWPプロジェクトの上書きなどで権限がうまく入らない場合には「Package.appxmanifest」の「ピクチャライブラリ」を直接チェックしてください。

ドキュメントへのファイル書き込みサンプルです。
// ドキュメントフォルダ // 1. Package.appxmanifestを開き // 「宣言」から「ファイルの種類の関連付け」を行い、書き込むファイルの拡張を追加する // 2. Package.appxmanifestを「コードを表示」で開き下記を追加する // <uap:Capability Name="documentsLibrary" /> { var folder = await KnownFolders.DocumentsLibrary.CreateFolderAsync("DocumentLibraryTest", CreationCollisionOption.OpenIfExists); var file = await folder.CreateFileAsync("test.txt", CreationCollisionOption.ReplaceExisting); using (var stream = await file.OpenStreamForWriteAsync()) { var bytes = System.Text.Encoding.UTF8.GetBytes(@"テストてすとtest"); await stream.WriteAsync(bytes, 0, bytes.Length); } }
ドキュメントフォルダへのアクセス権限は「Package.appxmanifest」への設定と、ファイル関連付けの2つを行います。
Package.appxmanifestを「コードを表示」で開き下記を追加します。
<uap:Capability Name="documentsLibrary" />

Package.appxmanifestを開き「宣言」から「ファイルの種類の関連付け」を行い、書き込むファイルの拡張を追加します。

特に権限の必要もなく書き込めます。ただし、デプロイごとにファイルが初期化されます。 ファイルは「User Files\LocalAppData\<アプリ名>\LocalState」 以下に作成されます。
// ローカルフォルダー // 「User Files\LocalAppData\<アプリ名>\LocalState」 以下にできる { var folder = await ApplicationData.Current.LocalFolder.CreateFolderAsync( "DocumentLibraryTest", CreationCollisionOption.OpenIfExists); var file = await folder.CreateFileAsync("test.txt", CreationCollisionOption.ReplaceExisting); using (var stream = await file.OpenStreamForWriteAsync()) { var bytes = System.Text.Encoding.UTF8.GetBytes(@"テストてすとtest"); await stream.WriteAsync(bytes, 0, bytes.Length); } }]]>
このため、Unityの.NET 3.5とUWPのコードが共存することになります。特に問題になるのが、UWPではasync/awaitを多用しますが、Unityの環境ではC#のバージョン的にそもそもasync/awaitが使えないため、コードの多くがこれを想定していません。
ここではUnityのアプリでasync/awaitを使う方法について紹介します。またasync/awaitでマルチスレッドになるので、同期の方法についても合わせて紹介します。おかしなところがあったら教えてください。
UWPではないUnityでのasync/awaitはこちらが詳しいです。
UWPにビルドしたコード上でasync/awaitを使う方法を2つ紹介します。
リポジトリはこちら
ちなみにUWP内のみコードを有効にするには #if UNITY_UWP をつけます。他にもいくつか定義がありますが、UWPビルドのどこかたタイミングで有効になるので、ビルドエラーになる場合もあります(細かくは調べていません)。
using System.Collections; using System.Collections.Generic; using UnityEngine; using System; #if UNITY_UWP using System.Threading.Tasks; #endif public class AsycnAwaitTest : MonoBehaviour { public TextMesh textMeshAynsc; public TextMesh textMeshCoroutine; // Use this for initialization void Start() { #if UNITY_UWP // Task.Runでasyncする Task.Run(async () => { UnityEngine.WSA.Application.InvokeOnAppThread(()=>{ textMeshAynsc.text = "Task.Run before : " + Time.time; }, true); await Task.Delay(5000); UnityEngine.WSA.Application.InvokeOnAppThread(() => { textMeshAynsc.text = "Task.Run after : " + Time.time; }, true); }); StartCoroutine(HeavyTask()); #endif } private IEnumerator HeavyTask() { #if UNITY_UWP // WaitWhileでまつ textMeshCoroutine.text = "Task.Run before : " + Time.time; var task = Task.Delay(5000); yield return new WaitWhile( () => !task.IsCompleted); textMeshCoroutine.text = "Task.Run after : " + Time.time; #else yield return null; #endif } }
Task.Run()で非同期タスクを起こし、この中のメソッドをasyncで定義すればその中ではawaitが使えます。これがシンプルだと思います。
StartCoroutine()で非同期処理を開始します。 コルーチンはasyncにできずawaitが使えないので、非同期メソッドのTaskを受け取りyield return new WaitWhile()で待ちます。従来のコードとの整合をとりつつ非同期メソッドを使う感じでしょうか。
上記2つの最大の違いはTask.Run()の場合はマルチスレッド、StartCoroutine()の場合はシングルスレッドになります(スレッドを生成せずメインスレッドを分割する)。
これによって何が変わるかというとTask.Run()内ではGameObjectへのアクセスができなくなります。WPFなどと同様にUIのオブジェクトはメインスレッドのみアクセスが可能です。そのため、ここで使っている3D TextのTextMeshをTask.Run()内で直接触ると例外が発生します。通常はSynchronizationContextで制御しますが、Unityにはこの仕組みがありません。
ではどうするかというと、UnityEngine.WSA.Application.InvokeOnAppThread()を使います。これによってアプリスレッド(Unityのメインスレッド)で処理されます。
もう一つ、UnityEngine.WSA.Application.InvokeOnUIThread()というのもありますが、こちらはXAMLのメインスレッドのようです。
ドキュメントはこちら docs.unity3d.com
]]>「Windows Holographic」は「Windows Mixed Reality」に名前が変わったようです。
Windows Mixed Realityは$299~という価格でHoloLensの$3,000とはだいぶ違うのですが、値段相応に環境もかなり違います。ということで相違点をまとめてみます Windows Mixed RealityのHMDは想像の範囲でもあるので随時更新します。
| HoloLens | Windows Mixed Reality HMD | |
|---|---|---|
| 価格 | $3,000/$5,000(PC不要) | $299~(別途PCが必要) |
| 動作形態 | スタンドアロン | PC接続 |
| ケーブル | なし | あり |
| 現実の見え方 | シースルー | 外界の映像は見えない |
| パフォーマンス | 固定(CPUはAtom) | PCに依存 |
| アプリ実行環境 | UWP | UWP |
| 環境センシング | Inside-Out | Inside-Out |
それらを解決する一つの方法として、Spectator Viewというものがリリースされました。

試してみて動くところまではできました。右側のカラー映像が結果です。
なんとなく動いた pic.twitter.com/MVE4Gtj7ps
— 中村 薫 (@kaorun55) 2017年2月14日
間違っているところなどあればフィードバックいただけると助かります。
Spectator ViewはHoloLensアプリに第三者視点を提供します。いままでもMixed Reality Captureでできましたが、よりきれいな映像にすることができます。
Spectator Viewの特長をまとめるとこのようになります。
制約としては下記が考えられます。
このことから、開発したアプリを公の場で発表する、プロモーションビデオの撮影という用途になると思います。
Microsoft HoloLens: Uses for Spectator View
必要なソフトウェアやリグのための3Dモデルはこちらにあります。cloneするかHoloLensCompanionKit全体をダウンロードしてください。

Spectator Viewには写真の機材が必要です。
「3D Printed Adapter」および「Aluminum HoloLens Bracket」は自分で作る必要があります。
このほかに下記機材が必要です
カメラとレンズは下記を推奨のようです。合わせて約50万円です。

Canon デジタル一眼レフカメラ EOS 5D Mark III ボディ EOS5DMK3

Canon 単焦点広角レンズ EF14mm F2.8 L II USM フルサイズ対応
Hotshoeはちょっと値段が高い(元のAmazon.comが$6(600円)くらい、Amazon.co.jpが6000円くらい)ので別で買った方がよさそうです。。。
HDMIキャプチャボードは下記のようです(PCIe接続)。約24,000円です。

Blackmagic Design intensity pro 4k ビデオキャプチャボード
カメラについてはHDMI出力できれば良さそう。キャプチャーボードは最初の写真を見る限りUSB接続でも良さそうということで、下記2つを購入して試しました。両方で約8万円です。
Blackmagic Design キャプチャーカード Intensity Shuttle for USB 3.0 000856
手順はこちらに詳しく書いてあります。
必要なソフトウェア
Desktop Video SDKが見つけづらかったので注意してください。下記画像の「Desktop Video 10.8.3 SDK」です。

それぞれインストールを行います。OpenCVは展開してCドライブ直下においてください(「C:\opencv」となるように)。
カメラとHoloLensのRGBカメラの位置を合わせるためにキャリブレーションを行います。
「HoloLensCompanionKit\HoloLensCompanionKit-master\SpectatorView\Calibration」にある「Calibration.sln」を開きます。
「dependencies.props」というファイルがあるので、下記2つのパスが通っていることを確認してください。

実行するとカメラの映像が表示されます。

つぎにHoloLensとカメラを配置します。今回はリグがないので、HoloLensの上にGoProをおいているだけです。

HoloLensとPCはUSBケーブルで接続します。
Calibrationプロジェクトの「stdafx.h」を開き、デバイスポータルのユーザー名とパスワードを設定します。事前にHoloLensのデバイスポータルをONにして、ユーザー名とパスワードを設定してください。

次に キャリブレーションを行います。GitHubにあるキャリブレーションパターンを印刷します。固めのボードに張るとよいと思います。
Caribrationアプリを起動し、キャリブレーションボードを動かします。途中Mixed Reality Captureが起動するので、HoloLensのカメラ撮影時のLEDが点滅します。

「C:\Users\<ユーザー名>\Documents\CalibrationFiles」にカメラ画像とHoloLensの画像および「CalibrationData.txt」が生成されます。

必要かどうかわかりませんが「HoloLensCompanionKit\SpectatorView\Compositor」をビルドします。HoloLensの実機情報をやりとりする部分です。PC側のCompositorはx64、HoloLensに組み込む側はx86ですので両方のビルドを行い「CopyDLL.cmd」を実行します。
「HoloLensCompanionKit-master\SpectatorView\Samples\SharedHolograms」をUnityで起動します。Holograms-240をベースにSpectator Viewのアドインが入っています。
先ほどの「CalibrationData.txt」をProjectビューに追加します。

メニューに「Spectator View」が追加されます。「Compositor」を開くと新しいウィンドウが表示されます。これがSpectator Viewの画面になります。


「Spectator View」のアドインは「AddIns\HolographicCameraRig」になるようです。

ビルド設定から「Run In Backgorund」にチェックします。これで(Unityエディター側の動作だと思いますが)ウィンドウがバックグラウンド状態でも実行されます。

Sharingサービスを実行します。

ここで表示されるサーバーのIPアドレスを後で使用します。
場合によってはSchemaバージョンエラーが出る場合があります。その場合はオリジナルのHolograms-240やHoloToolkit-UnityにあるSharingServerを使用してください。
Spectator View(HoloLens)とSharingサーバーのIPアドレスを設定します。

まずはエディター上で実行してSharingサーバーに接続できることを確認します。

続いてUWPを行い、HoloLensにデプロイします。
HoloLens上でこのアプリを実行し(デバイスポータルから起動すると楽です)、Sharingサーバーに接続されていることを確認します。次にUnityエディター上で実行し、サーバーおよびHoloLensに接続できると、PC上のカメラ位置がHoloLensに同期するようになります。
なんとなく動いた pic.twitter.com/MVE4Gtj7ps
— 中村 薫 (@kaorun55) 2017年2月14日
機材が複雑かつ3Dプリントで作成する必要がある、環境構築が煩雑、HoloLensが2台以上必要であることから、なかなか試しづらいですがアプリデモでは必要になってくるかと思います。
自分も3台のHoloLensでMixed Reality Captureを使った第三者視点はやったので。
]]>
TMCNベースでPETS、ホロラボ、ショッカソン、HoloEyes 連合で展示をしていました。
HoloLensが目を引くので、休憩時間中は人もたえず、3,4台体制だったので、今回も結構な人数に体験してもらうことができたと思います。


17:25分からの枠でした。
200-300人くらいでしょうか。おかげさまで満席でした。
最初に聞いてみたところ、HoloLens持ってる人は数人、興味あるけど買ってない人が9割くらい、まだかぶったことがないひとが6割くらいのようです。
Togetterのまとめと当日の資料はこちらです。
]]>
参加してくれた方々、協力してくれた各地のスタッフの方々、会場提供などご協力いただいた方々ありがとうございます。
各地それぞれ楽しく会を開催できました。
2016/12/2の日本での予約開始時にリリースが2017/1/18に決まったことを受けてTMCNや各地のxMCNメンバーの方に持ちかけたところ、みなさん乗ってくれました。
1/18に株式会社ホロラボの登記をしたこともあり、会社紹介もかねて回ることができて良かったです。
HoloLens所持者を対象としたハンズオンと、興味あるからすべてを対象としたミートアップの2部構成で、ハンズオンは92人、ミートアップは237人の方にご参加いただきました(スタッフ除く)。

ハンズオンでは、1台のHoloLensを使ったアプリ開発の初歩から複数台のHoloLensの空間を強調させるSharing体験までを行いました。Sharingは複数台のHoloLensが必要ですが、HoloLensの真価を発揮するための重要な特徴であることから、せっかく集まるこの機会に体験してもらおうと考えました。
今回ぼくが使った資料はこちらにまとめています。ハンズオン、ミートアップで使用した資料をまとめています。HoloLensの概要から開発体験までできました。実施したうえでの改定事項も対応していきます。
最初のイベントは福岡で17人の方にご参加いただき開催しました。
日本マイクロソフトの高橋忍さんにもご参加いただき、HoloLensを含めたマイクロソフト全体の話や、ハンズオンのフィードバックをいただくことができました。

平日の日中、HoloLens所持者対象にもかかわらず60人以上の方がハンズオンに参加してくれました。スタッフと合わせると80台を超えたHoloLensが集結しました。

Photo by 集合写真家Masahiro Takechi
この写真がHoloLensの生みの親であるAlex Kipmanまで届いたこと。
<3 <3 <3 https://t.co/H1usmRuJGS
— Alex Kipman (@akipman) 2017年2月2日
HoloLens公式アカウントからリプライをもらったことが、個人的に非常にうれしかったです。
@kaorun55 what a great looking group!
— Microsoft HoloLens (@HoloLens) 2017年2月2日
ミートアップも申し込みで約200人、スタッフも合わせて実際に参加された人数が約180人、HoloLensの台数は数えきれないほどになりました。
日本マイクロソフトのWindows本部長である三上さんからも開会のあいさつをいただきました。
ここで発表していただいた坪倉さんのスライドがとても分かりやすいので、特に広告などコンシューマー向けにHoloLensの利用を検討している方は一度見ておくべし。と思います。
取材記事もでています。
PANORA VR » HoloLensはおもちゃではない——クリエイターが語る「仕事でMR」の魅力とは?
ハンズオン、ミートアップの様子は動画でも公開しています。
大阪は34人の方に参加していただきました。
日本マイクロソフトの西脇さんとちょまどさんにもご参加いただき、日本のコミュニティでは初の公開となるSruface Studioのデモが行われました。Surface Studio、DialとHoloLensの連携も今後楽しみですね。

大阪開催の後、参加者の @sumihiro さんが、iPhone用のHoloLensキーボードを作ってくれました。HoloLensは日本語入力が難しいのですが、このアプリでだいぶ改善されました。
HoloLensにiPhoneから文字入力ができるHoloKeyboardをAppStoreで配信開始しました!https://t.co/czMdoSTo4e
— ヤバいスミヒロ (@sumihiro) 2017年2月9日
オープンソース版も並行して公開していますので、どうぞご利用ください。#HoloLens #HoloLensJP
最後の東北では15人の方にご参加いただきました。
日本マイクロソフトの金尾さんから、マイクロソフト全体の中でのHoloLensの位置づけについてお話いただきました。

HoloLensを購入して、コミュニティに参加する人が100人近くもいることが今回一番の驚きです。日本の購入数の初動が「欧州6か国合計」の3倍と言われるなど、たくさんのHoloLensが日本に来ています。
今回のミートアップで各地でHoloLensを活用しようとしている方たちとたくさん出会えたので、これからも継続して進めていこうと思います。
]]>
慣れるとスキャンからリグ入れまでで30-60分でしょうか。
詳しい人からすると目新しいものではないかもしれませんが、手軽にここまでできるようになったというのは進歩なんだろう思います。

フリー素材です。常識の範囲内でご使用ください。
https://www.dropbox.com/sh/kxtcgvzbgxo4bzv/AAAS1TkKjCWPe826qYXQkhr_a?dl=0
1. iPadにStructure Sensorを接続し、itSeez3Dで3Dスキャンします。このとき、Tポーズでとることで、リグを入れて好きなようにできます。ただし、Tポーズの3Dスキャンが難しいのでAポーズでリグを入れてモデルを調整するやり方でもいいかもしれません。

2. スキャンデータはクラウドに上げて処理されます。しばらくすると、iPadでプレビューできます。itSeez3Dアプリでここまでの手順は無料です。

3. 3Dデータに問題なければダウンロードします。ここで課金が発生します。

4. 3Dモデルの形式はOBJなので、MeshLabなどで見られます。

5.このモデルをMayaに入れ、モデルを調整(スケールの関係でX,Y,Zの大きさをそれぞれ100倍、正面を向くように回転)し、自動リグ処理をします。
このファイルをFBXで出力すれば、Unity上で扱えるようになります。

6.モーションデータを作成します。UnityはBVHファイルが使えないので、Motion Builderでモデルデータに埋め込むか、BlenderでBVHをFBXに変換します。
7.3DモデルとモーションデータをUnityに入れ、アプリを作成します。
そのままだとHoloLensで表示するには重いのでメッシュの数を減らしたり、ボーンも調整してあげると、きれいに表示できるようになります。
ちなみに、モーションデータはPerfume official global websiteのものを使用しています。
3Dスキャン、リグ入れは場所、機動性とトレードオフで改善可能なので、それも進めようと思います。
]]>・学校が推奨しているOSがwindows
ですので、windows上で仮想OSとか使わずに機械学習のライブラリが使えるような
環境構築をしていきたいと思います。
確認済み環境:Windows 8.1 Pro, 64bit
参考:基本的にはこの二つを参考にしています。
参考1 : やってみよう分析!第8章:PythonとEclipse(PyDev)で作る分析環境 for Windows - Qiita
参考2 :
PythonでNumpyとMatplotlibを利用する(Windows) - Gobble up pudding
ここからpython2.7の最新版をダウンロードしてください。

ページ下部の、windows x86-64 MSI installerを選択してください。

インストーラを起動した後は、主にインストーラに従う形でOKです。
環境変数のPathに、
C:¥Python27;
を追加してください
(ここら辺は他にも解説しているサイトがありますので、割愛します)
[確認]
コマンドプロンプトで
python
と打ち、以下の画面になればOKです。

参考1とここから少しづつ変わっていきます。
具体的には、.whlファイルのインストール方法と、msiインストーラを使わないことが
記事と違うところです。
http://www.lfd.uci.edu/~gohlke/pythonlibs/#numpy
から、適切なバージョンのものを選んでダウンロードしてください。

(今回の場合, 64bit でpython 2.7なので、
numpy‑1.9.2+mkl‑cp27‑none‑win amd64.whl
を選びます。)
ダウンロードが完了したら、C:¥Python27¥Scripts
のフォルダに入れて下さい。

これから、whlファイルをインストールします。
具体的には、pipというパッケージ管理ツールを利用します。
まず、コマンドプロンプト上で、C:¥Python27¥Scriptsへ移動します。

次に、
pip install (インストールしたいwhlファイル(!!ファイル名は変えてはダメ!!))
と打ち、以下のようなコンソールが出て来ればnumpyのインストールが完了します。

[確認]
コマンドプロンプト上で
python
と打ったあと、
import numpy
と打ち、Errorが出てなければ大丈夫です。

次に、numpyと同様にして、以下の二つのライブラリを導入してください。
scipy
http://www.lfd.uci.edu/~gohlke/pythonlibs/#scipy
pandas
http://www.lfd.uci.edu/~gohlke/pythonlibs/#pandas

[確認]
numpyの時と同様、確認してください。

参考1で言われている通り、matplotlibは楽です。
コマンドプロンプト上で、C:¥Python27¥Scriptsへ移動します。
そして、以下のコマンドを打つだけですw
pip install matplotlib

機械学習ライブラリである、scikit-learnをインストールします。
(念のため、このライブラリを最後にしています。)
numpyの時と同様にして、インストールをしてください。
http://www.lfd.uci.edu/~gohlke/pythonlibs/#scikit-learn
参考1の通りです。
Eclipseをインストールし、pyDevをインストールしてください。
Eclipseを再起動したのち、「File -> New -> Other..」を選択

PyDev Project を選択
青いリンクのような場所をクリックし、Pythonの情報をEclipse側に設定します.
(自動設定のような項が真ん中のボタンに出るので、その真ん中のボタンを押してください(画像なし))
そして、Finishを押します。
出現したプロジェクトフォルダのところで右クリック→ PyDev Module
を選択します。
このような形でパッケージ名とmodule名を命名したください。
適当な場所から、サンプルを拾ってきて、実行(上部の再生ボタン)を押し、
Python Run を選択して実行し、できればOK!
サンプル:
http://scikit-learn.org/stable/auto_examples/plot_cv_predict.html#example-plot-cv-predict-py

以下のページを参考にしてください。
]]>





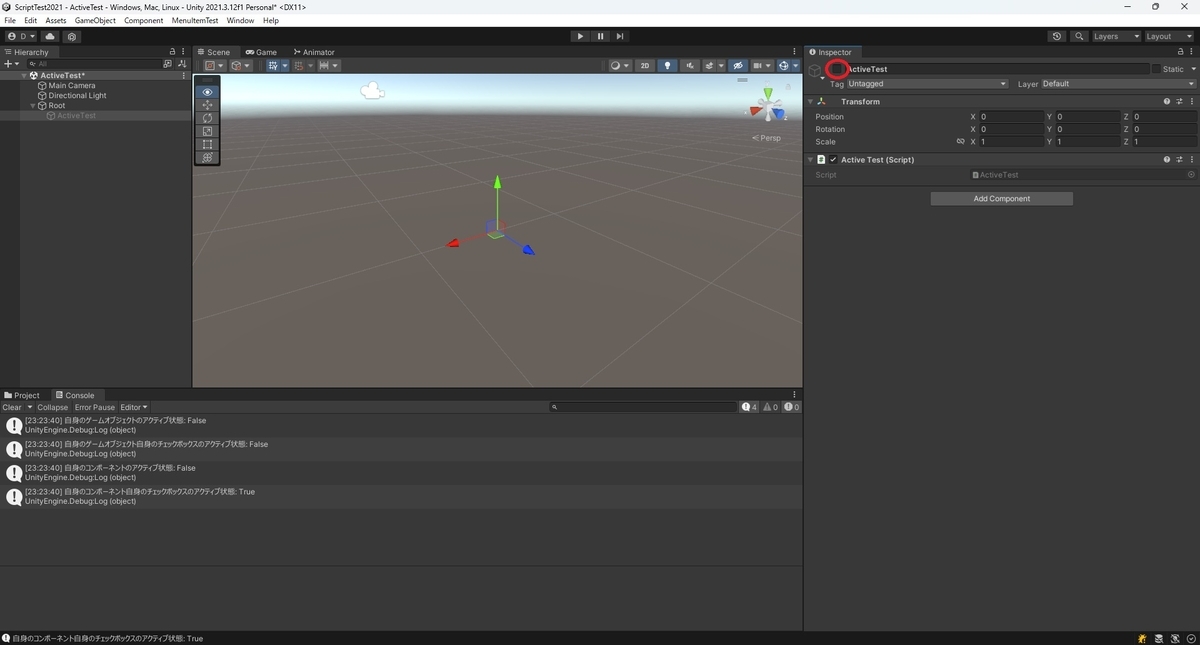
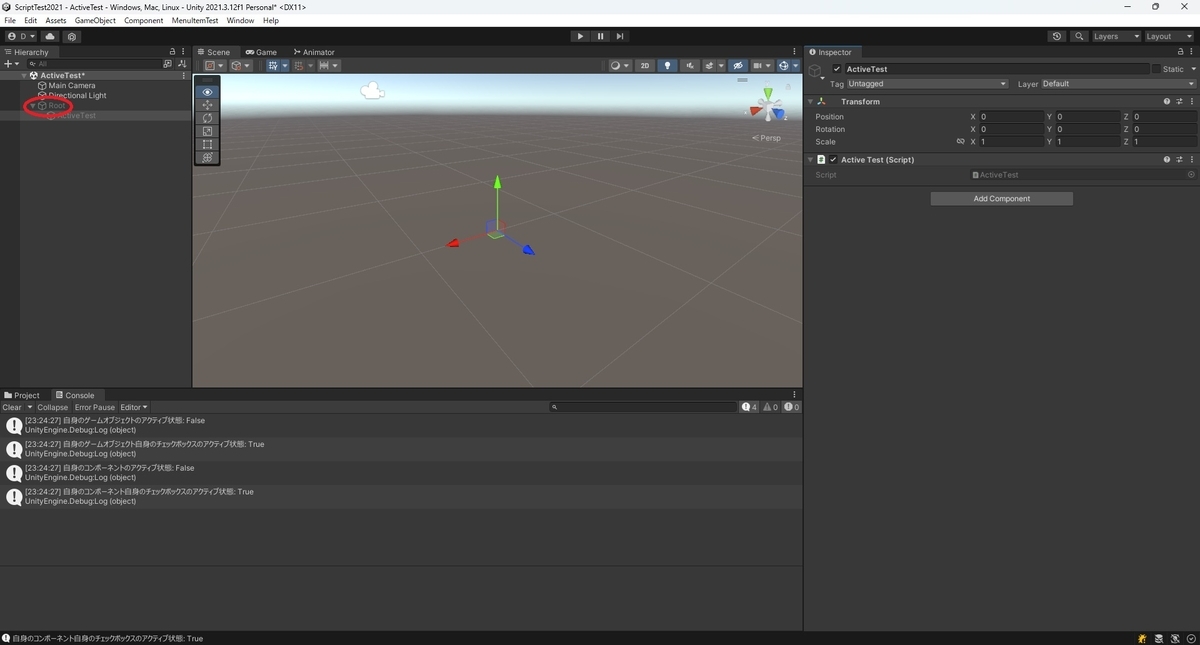













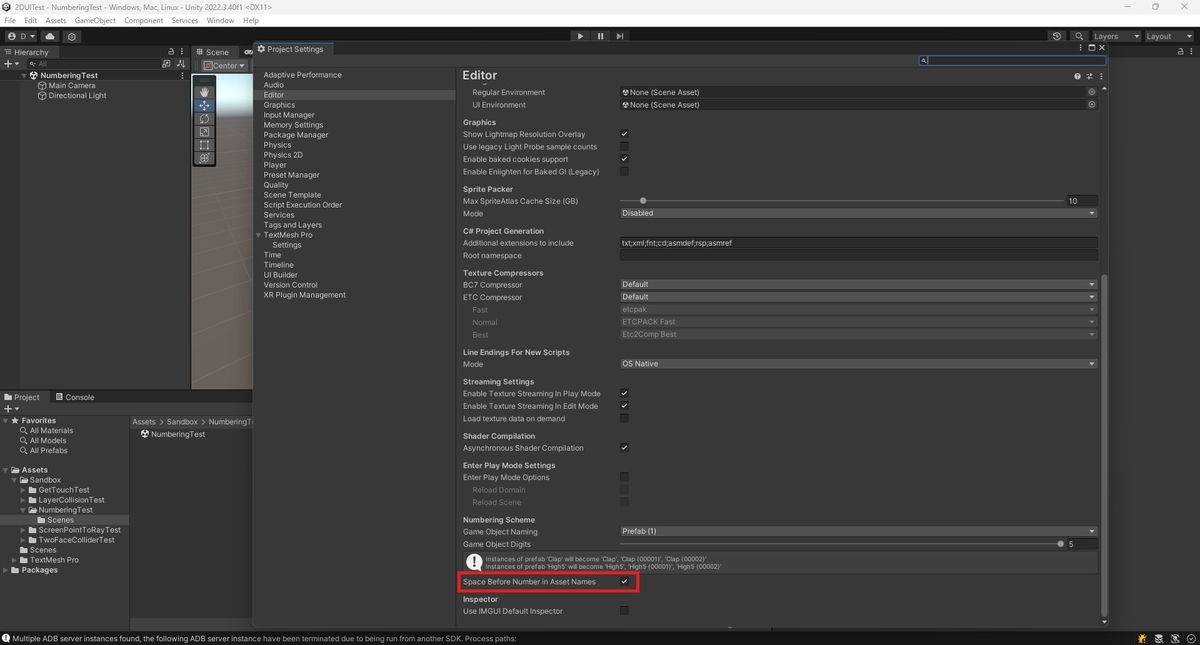












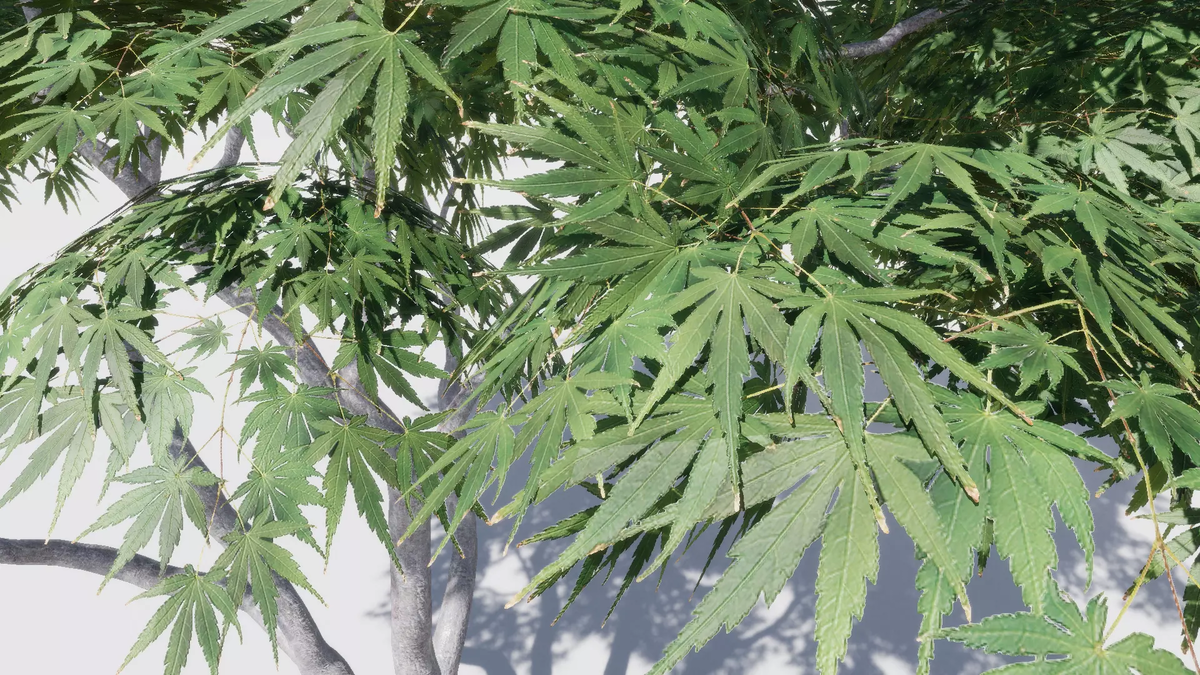



![KKHMF 3.3V 5V MB102ブレッドボード用 電源モジュール パワーモジュール [並行輸入品]](https://m.media-amazon.com/images/I/518x5lX1vPL.jpg "KKHMF 3.3V 5V MB102ブレッドボード用 電源モジュール パワーモジュール [並行輸入品]")
電源供給ケーブル")
![Fotasy SCX2 1/4-Inch 20 Tripod Screw to Hot Shoe Adapter with Premier Cleaning Cloth (Black) by Photography Accessories INC [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/510U-06Cy1L._SL160_.jpg "Fotasy SCX2 1/4-Inch 20 Tripod Screw to Hot Shoe Adapter with Premier Cleaning Cloth (Black) by Photography Accessories INC [並行輸入品]")
{kind=link}